Yes, definitely.
- Make sure you’re up to date with the repository: GitHub - stereolabs/zed-ros2-wrapper: ROS 2 wrapper for the ZED SDK
- Run the build command in the repo and source install/setup.bash
- Wait until “ros2 launch zed_wrapper zed_camera.launch.py camera_model:=<camera_model>” finishes the installation before launching “ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=zedx sim_mode:=true”
@Myzhar, this is not a bug, but being able to see the installation steps during this process would be helpful. I’ve noticed that you can only see the percentage and remaining installation time when you launch ZED_Depth_Viewer in another terminal. However, it only displays the status at launch and doesn’t update the terminal, which is probably why I thought my command had frozen the process.
About the issue on rviz;
here is the rviz and isaac sim
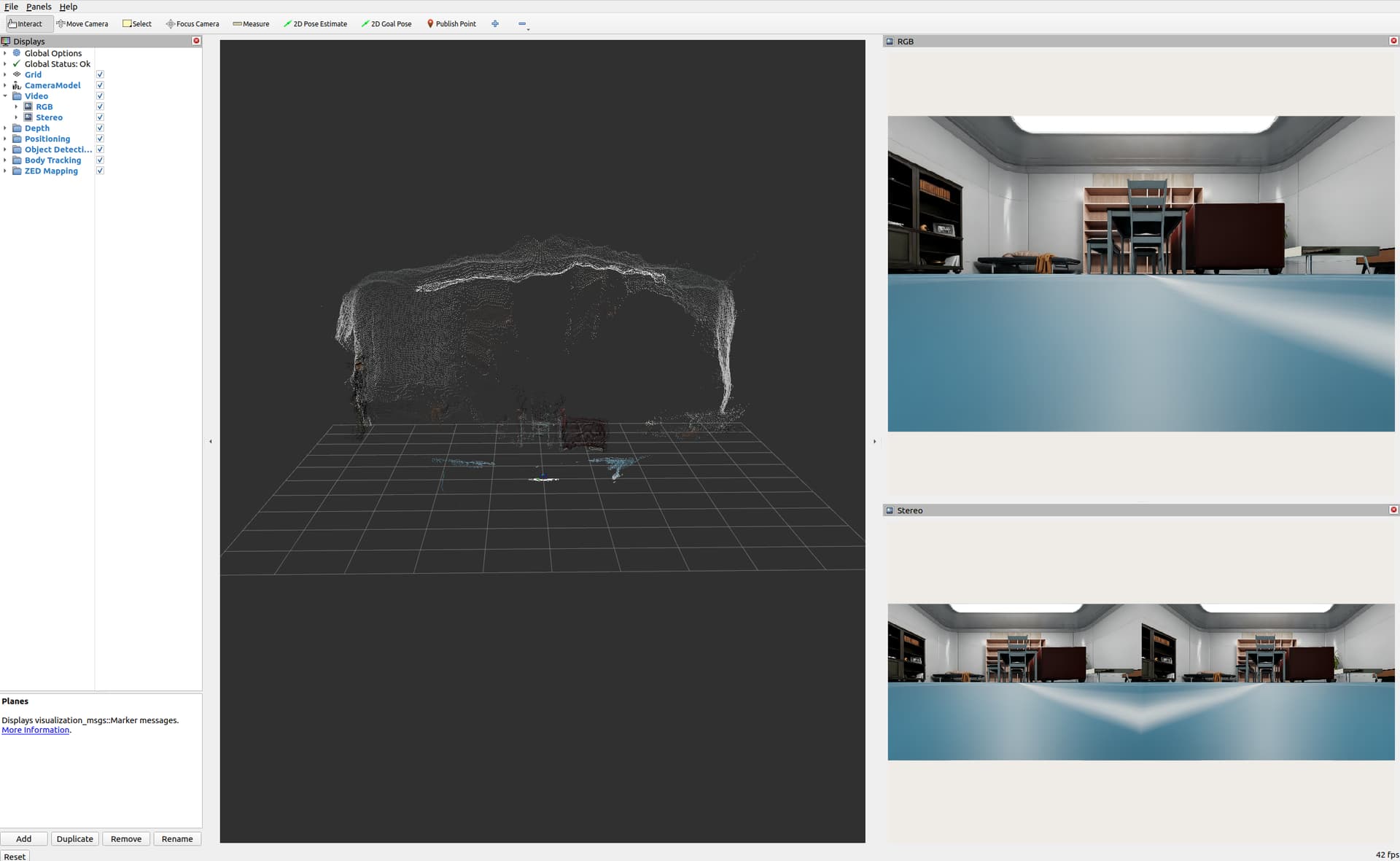

- then on another termianl, i’m running
ros2 topic pub /zed/zed_node/path_map nav_msgs/msg/Path "{
header: {
frame_id: 'map',
stamp: {sec: 0, nanosec: 0}
},
poses: [
{
header: {
frame_id: 'map',
stamp: {sec: 0, nanosec: 0}
},
pose: {
position: {x: 0.0, y: 0.0, z: 0.0},
orientation: {x: 0.0, y: 0.0, z: 0.0, w: 1.0}
}
},
{
header: {
frame_id: 'map',
stamp: {sec: 0, nanosec: 0}
},
pose: {
position: {x: 0.0, y: 0.0, z: 1.0},
orientation: {x: 0.0, y: 0.0, z: 0.0, w: 1.0}
}
},
{
header: {
frame_id: 'map',
stamp: {sec: 0, nanosec: 0}
},
pose: {
position: {x: 1.0, y: 1.0, z: 1.0},
orientation: {x: 0.0, y: 0.0, z: 0.0, w: 1.0}
}
}
]
}"
and on the terminal i have
publisher: beginning loop
publishing #1: nav_msgs.msg.Path(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), poses=[geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.0, y=0.0, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0))), geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.0, y=0.0, z=1.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0))), geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=1.0, y=1.0, z=1.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)))])
publishing #2: nav_msgs.msg.Path(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), poses=[geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.0, y=0.0, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0))), geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.0, y=0.0, z=1.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0))), geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=1.0, y=1.0, z=1.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)))])
publishing #3: nav_msgs.msg.Path(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), poses=[geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.0, y=0.0, z=0.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0))), geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=0.0, y=0.0, z=1.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0))), geometry_msgs.msg.PoseStamped(header=std_msgs.msg.Header(stamp=builtin_interfaces.msg.Time(sec=0, nanosec=0), frame_id='map'), pose=geometry_msgs.msg.Pose(position=geometry_msgs.msg.Point(x=1.0, y=1.0, z=1.0), orientation=geometry_msgs.msg.Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)))])
and i can actually see the path generated on rviz, but the camera doesnt moving there. And I wonder if there could be a parameter or something else that blocks it.
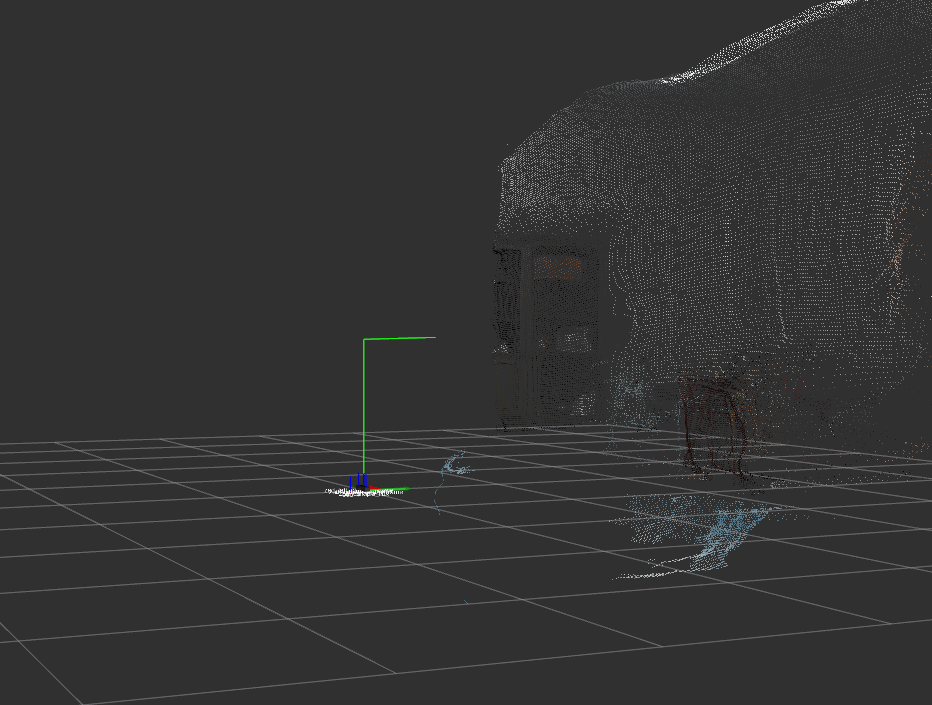
Thanks !