Hello,
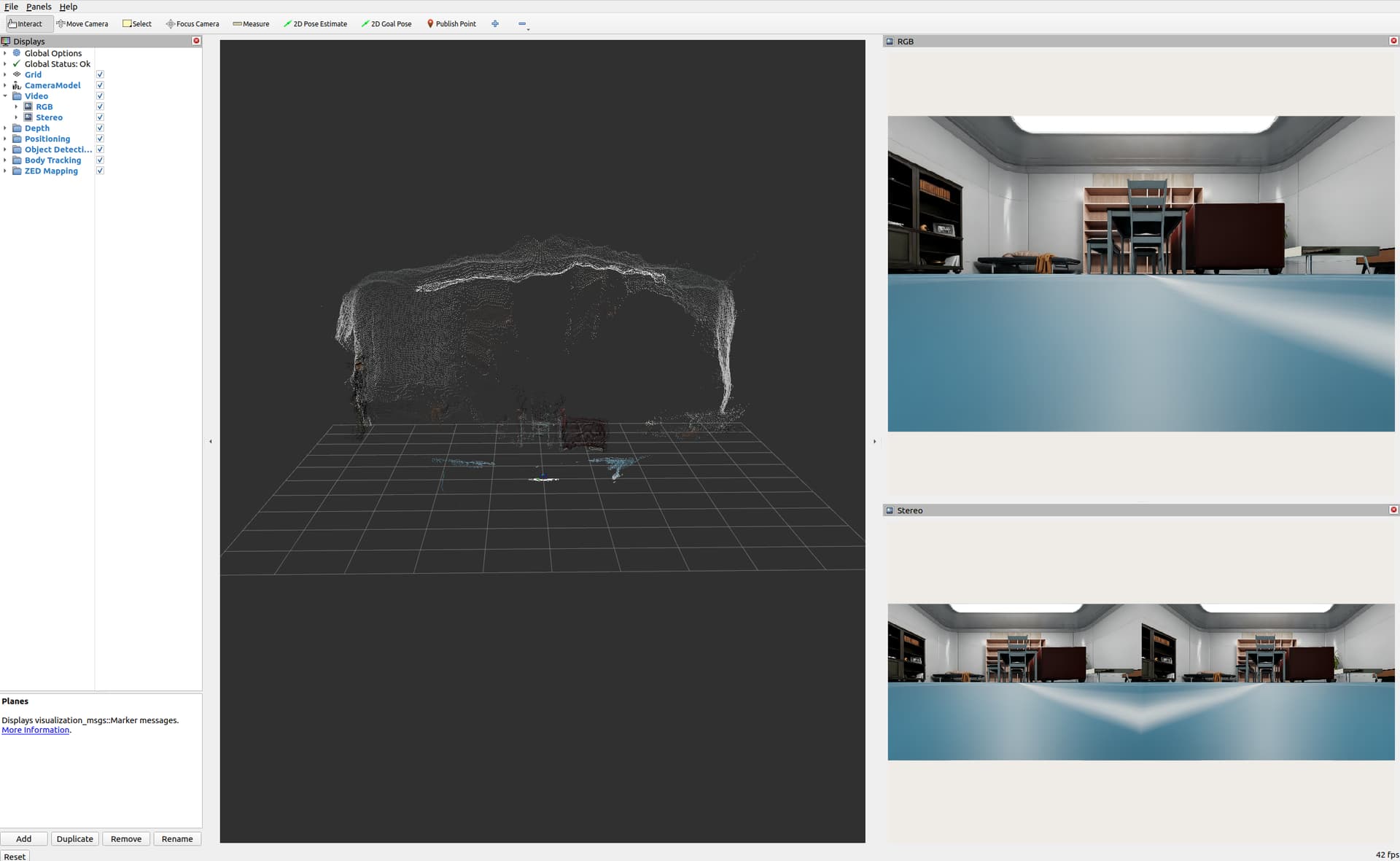
I am trying to connect isaac sim to ROS2 but the command ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zedx sim_mode:=true fails and so ros2 launch zed_display_rviz2 display_zed_cam.launch.py camera_model:=zedx sim_mode:=true
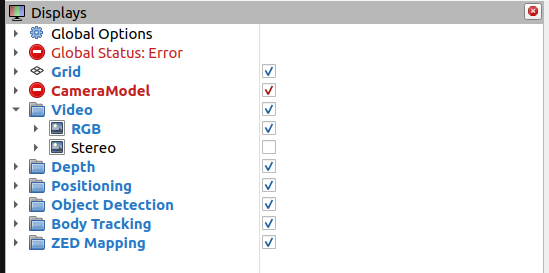
[component_container_isolated-2] [WARN] [1744736779.746563411] [zed.zed_node]: Error connecting to the simulation server: CORRUPTED SDK INSTALLATION
[component_container_isolated-2] [ERROR] [1744736779.746645987] [zed.zed_node]: Camera detection timeout
[component_container_isolated-2] [2025-04-15 17:06:19 UTC][ZED][ERROR] [Object Detection] Object detection model is corrupted or unreadable
[component_container_isolated-2] [2025-04-15 17:06:19 UTC][ZED][ERROR] [ZED] [Depth] NEURAL CORRUPTED MODEL
[component_container_isolated-2] [2025-04-15 17:06:19 UTC][ZED][WARNING] CORRUPTED SDK INSTALLATION in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
[ERROR] [component_container_isolated-2]: process has died [pid 16779, exit code 1, cmd '/opt/ros/humble/lib/rclcpp_components/component_container_isolated --use_multi_threaded_executor --ros-args --log-level info --ros-args -r __node:=zed_container -r __ns:=/zed'].
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[robot_state_publisher-1] [INFO] [1744736796.783467939] [rclcpp]: signal_handler(signum=2)
[INFO] [robot_state_publisher-1]: process has finished cleanly [pid 16777]
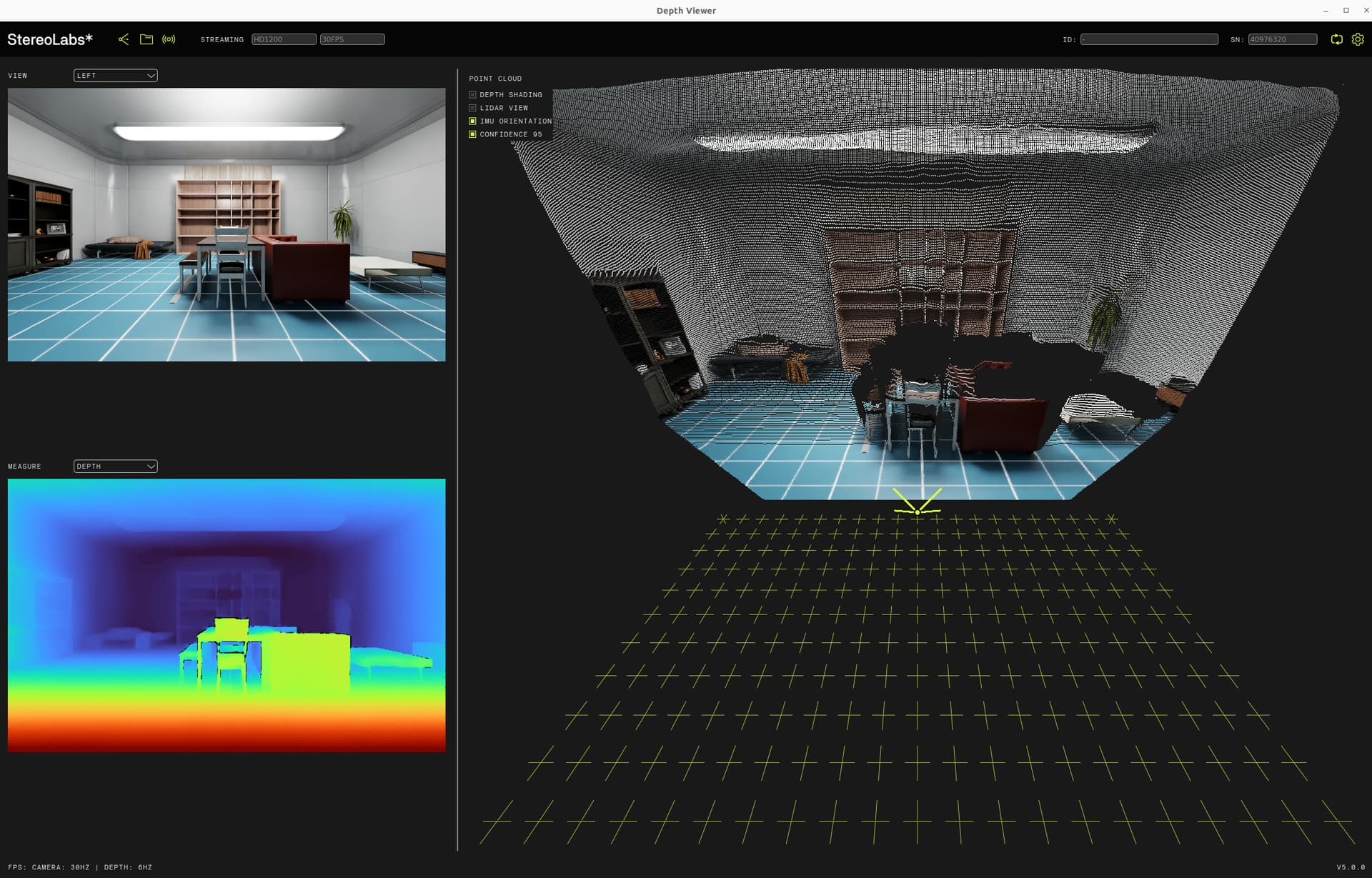
However I can visualize the data through ZED_Depth_Viewer
[2025-04-15 17:18:33 UTC][ZED][INFO] Logging level INFO
[Streaming] Warning : receiving port 30000 is not available (already used)... switching to port 30002. Retrying...
[Streaming] Metadata timeout. the size is equal to 196 instead of 21960. Skipping.
[Streaming] Metadata timeout. the size is equal to 196 instead of 21960. Skipping.
[Streaming] No backward compatibility required.
[2025-04-15 17:18:33 UTC][ZED][INFO] [Init] Depth mode: NEURAL
[2025-04-15 17:18:33 UTC][ZED][INFO] [Init] Serial Number: S/N 40976320
[2025-04-15 17:18:33 UTC][ZED][WARNING] Simulated ZED camera used.
[2025-04-15 17:18:33 UTC][ZED][WARNING] [Init] Invalid calibration file. On Linux, call export LC_ALL="C" and restart your application.
[2025-04-15 17:18:33 UTC][ZED][WARNING] Self Calibration Disabled.
ZED_Diagnostic file
ZED_Diagnostic_Results.json (4.9 KB)
ZED_Explorer capture

** [SVO] Hardware compression (NVENC) available **
[Streaming] Warning : receiving port 30000 is not available (already used)... switching to port 30002. Retrying...
[Streaming] Metadata timeout. the size is equal to 196 instead of 21960. Skipping.
[Streaming] No backward compatibility required.
[Streaming] Warning: Corrupted frame chunk received (recv: 196 / expect 4112) from ip : 127.0.0.1 at ts 1744737112447(ms)
Can you please help me to solve this issue ?