I have integrated the Zed2 Camera with my robot and utilized this Xacro file to generate a Moveit2 configuration for my robot in ROS Humble. However, when I launch the Zed2 Camera and Moveit, I am unable to visualize the point clouds in RViz. Only the robot with the attached camera is visible.
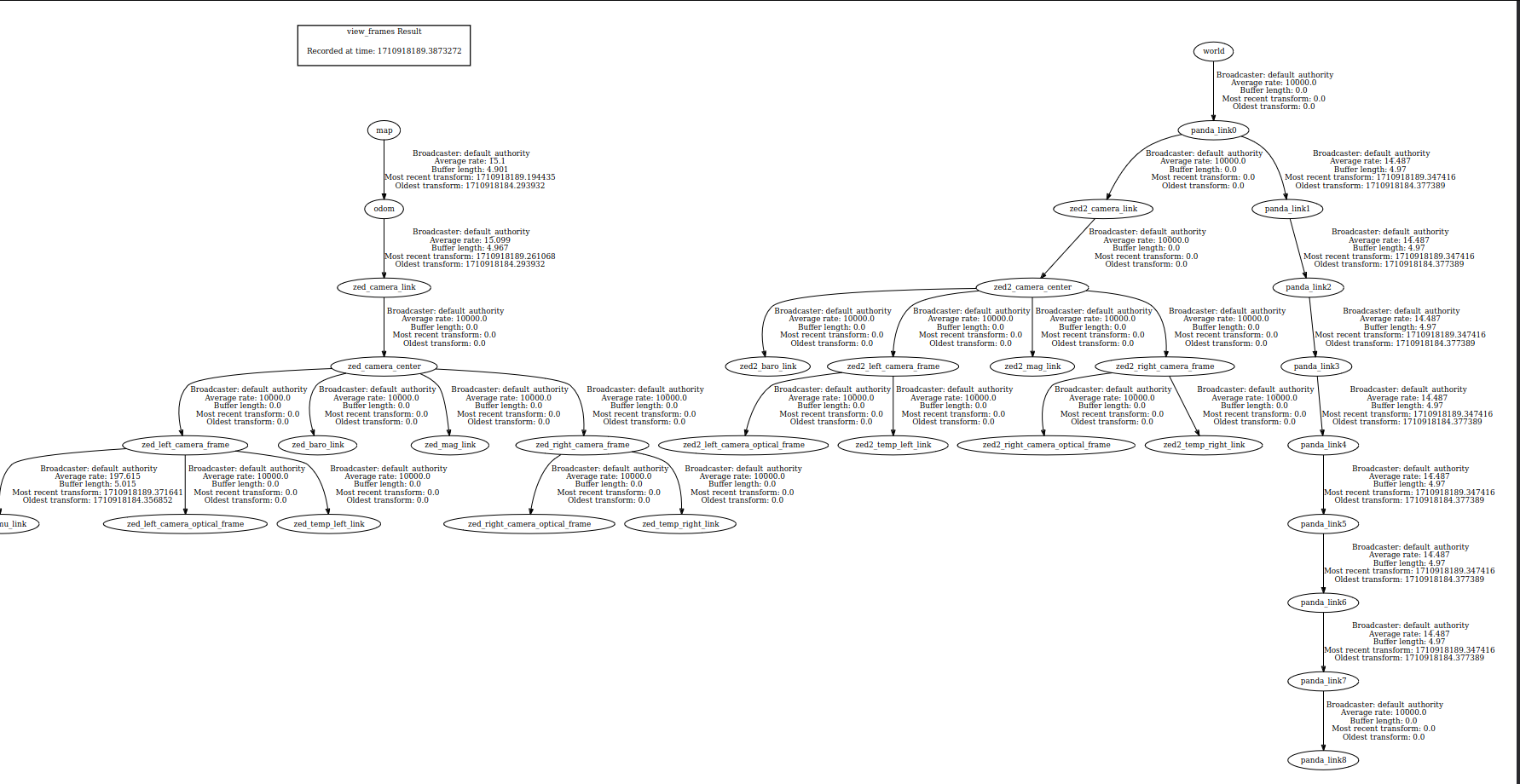
1.Is there anything wrong with my robot frame?
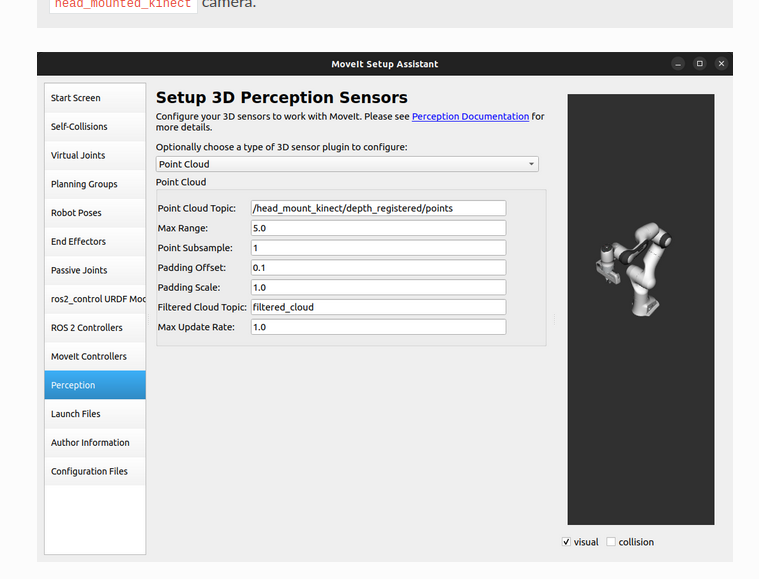
2. What do I need to set for the Moveit perception parameters?
Great to hear you were able to set the system tf successfully.
What topic have you set in the “Point Cloud Topic” field in the Moveit interface?
The point cloud topic in your case should be “zed/zed_node/point_cloud/cloud_registered”.
The node name may be different depending on your configuration, please run ros2 topic list to get the information of published topics.