I’m trying to calibrate a stereo pair of ZED X One cameras (using the zed calibration tool and other methods) and then trying to ingest that calibration either into the ZED_Depth_Viewer, or more importantly, into the zed ros2 wrapper.
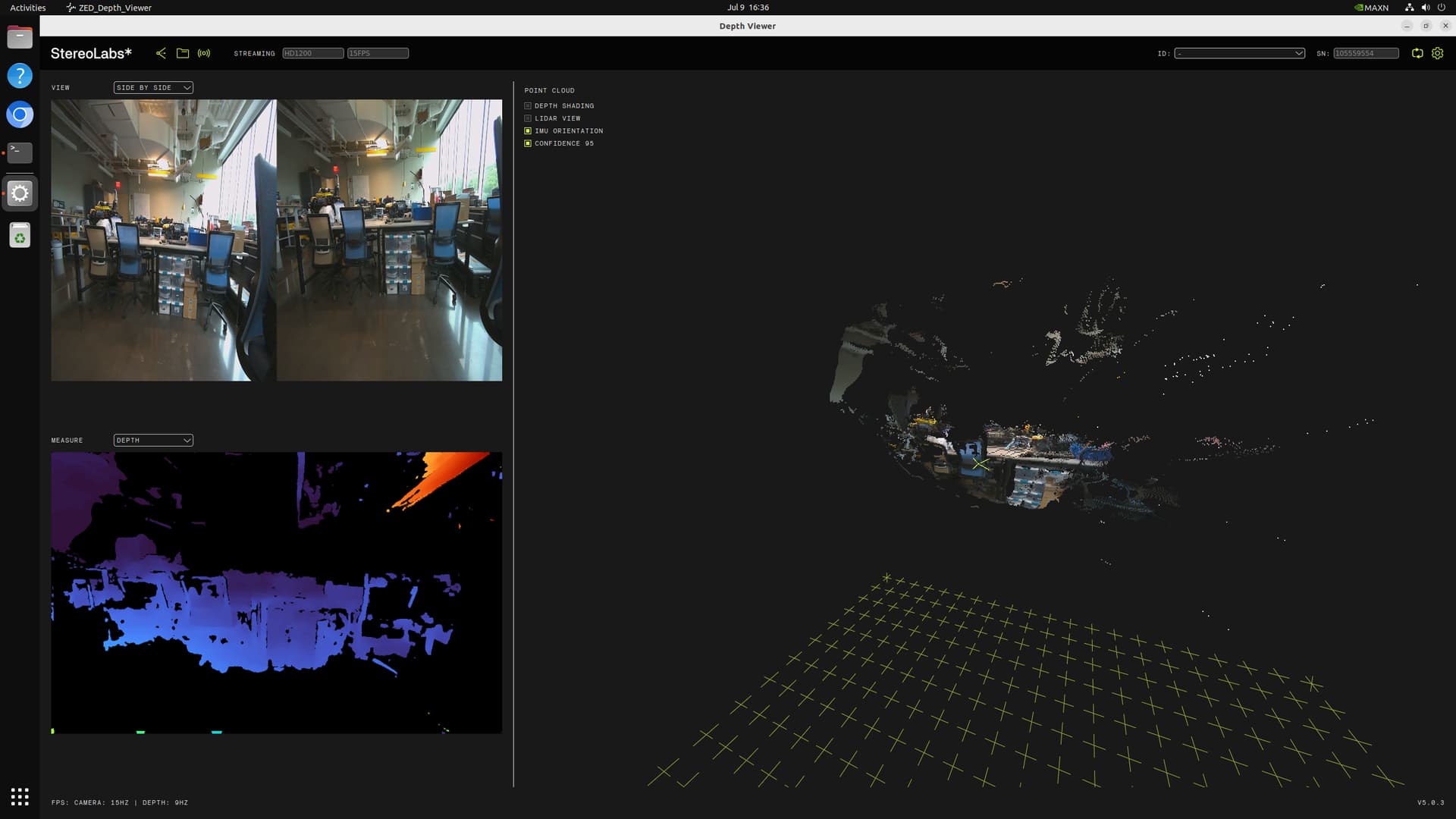
There is a screenshot of the best result I’ve been able to get out of multiple calibration attempts when ingesting the calibration file into the ZED_Depth_Viewer. It seems quite poor.
The visual results when ingesting the calibration into the zed ros2 wrapper are even worse.
I’ve calibrated the zed x mini many times in more challenging conditions (currently the zed x ones are in tubes with flat acrylic panes on the bench) and have had much better results.
This post is the general flow I’m following: Stereo ZED X One with ROS2 Wrapper.
Has anyone had success lately (and with what sdk/driver/wrapper versions and generally the steps taken) in calibrating a stereo pair of ZED X One cameras?