Dear support,
here is our setup:
- ZedXMini
- jetson orin on ubuntu 20.04
- Zed sdk 5.1.1
- Zed_wrapper ROS noetic
We use the ROS wrapper to publish the data and record as rosbags.
We have noted the following issues:
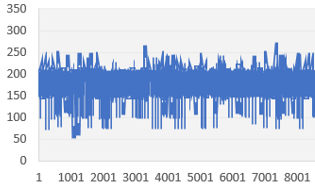
- IMU frequency is between 190 and 150Hz, instead of 400Hz as documented.
- IMU frequency is highly unstable between 190 and 150Hz.
Here is a plot of the frequency from the timestamps of the imu topic published by the wrapper. We encountered a similar phenomenon when recording with the ZED_sensor program.
Is it a normal behavior? Are there upcoming fixes scheduled?
Thank you.