Hi all,
We need to achieve the lowest possible latency for our application. The first goal is to send the ZED X streams through a local network and display them on a monitor.
The setup I’m currently using :
- ZED X camera
- ZED Box Orin™ NX 8GB
- Asus ZenScreen (used as ZED Box monitor)
- POE+ Switch
- Personal computer, GTX 1660Ti
For the first two tests I tried to have the simplest possible pipeline by displaying the left stream directly on the screen connected to the ZED Box.
Test 1
nvargus nv3dsink
pipeline : gst-launch-1.0 nvarguscamerasrc sensor-id=0 sensor-mode=0 ! "video/x-raw(memory:NVMM),width=1920,height=1200,framerate=60/1,format=NV12" ! nv3dsink
latency 5 : 84ms
latency 4 : 84ms
latency 3 : 84ms
latency 2 : 83ms
latency 1 : 84ms
latency 0 : 84ms
mean : 84ms
Test 2
zedsrc nv3dsink
pipeline : gst-launch-1.0 zedsrc camera-fps=60 stream-type=0 camera-resolution=2 ! nv3dsink
latency 5 : 100ms
latency 4 : 100ms
latency 3 : 116ms
latency 2 : 116ms
latency 1 : 100ms
latency 0 : 100ms
mean : 105.3ms
For the two following tests I’ve sent the stream in H264 on the local network.
Test 3
nvargus udp autovideosink
pipeline jetson : gst-launch-1.0 nvarguscamerasrc sensor-id=0 sensor-mode=0 ! "video/x-raw(memory:NVMM),width=1920,height=1200,framerate=60/1,format=NV12" ! nvv4l2h264enc maxperf-enable=true insert-sps-pps=true bitrate=8000000 ! rtph264pay ! udpsink host=10.1.99.255 port=20000 sync=false async=false max-lateness=1000
pipeline pc : gst-launch-1.0 udpsrc port=20000 ! application/x-rtp,encoding-name=H264,payload=96 ! rtph264depay ! h264parse ! avdec_h264 ! autovideosink
latency 4 : 105ms
latency 3 : 107ms
latency 2 : 110ms
latency 1 : 107ms
latency 0 : 106ms
mean : 107ms
Test 4
zedsrc udp autovideosink
pipeline jetson : gst-launch-1.0 zedsrc camera-fps=60 stream-type=0 camera-resolution=2 ! videoconvert ! "video/x-raw,format=NV12" ! nvvidconv ! nvv4l2h264enc maxperf-enable=true insert-sps-pps=true bitrate=8000000 ! rtph264pay ! udpsink host=10.1.99.255 port=20000 sync=false async=false max-lateness=1000
pipeline pc : gst-launch-1.0 udpsrc port=20000 ! application/x-rtp,encoding-name=H264,payload=96 ! rtph264depay ! h264parse ! avdec_h264 ! autovideosink
latency 6 : 156ms
latency 5 : 173ms
latency 4 : 173ms
latency 3 : 158ms
latency 2 : 154ms
latency 1 : 143ms
latency 0 : 170ms
mean : 161ms
The last test is by directly streaming using the ZED SDK (camera streaming sample apps). Therefore It is probably less relevant as both streams are sent, unlike the previous tests.
Test 5
zed stream
jetson : camera sender sample app
pc : camera receiver sample app
latency 4 : 233ms
latency 3 : 236ms
latency 2 : 234ms
latency 1 : 233ms
latency 0 : 202ms
mean : 227.6ms
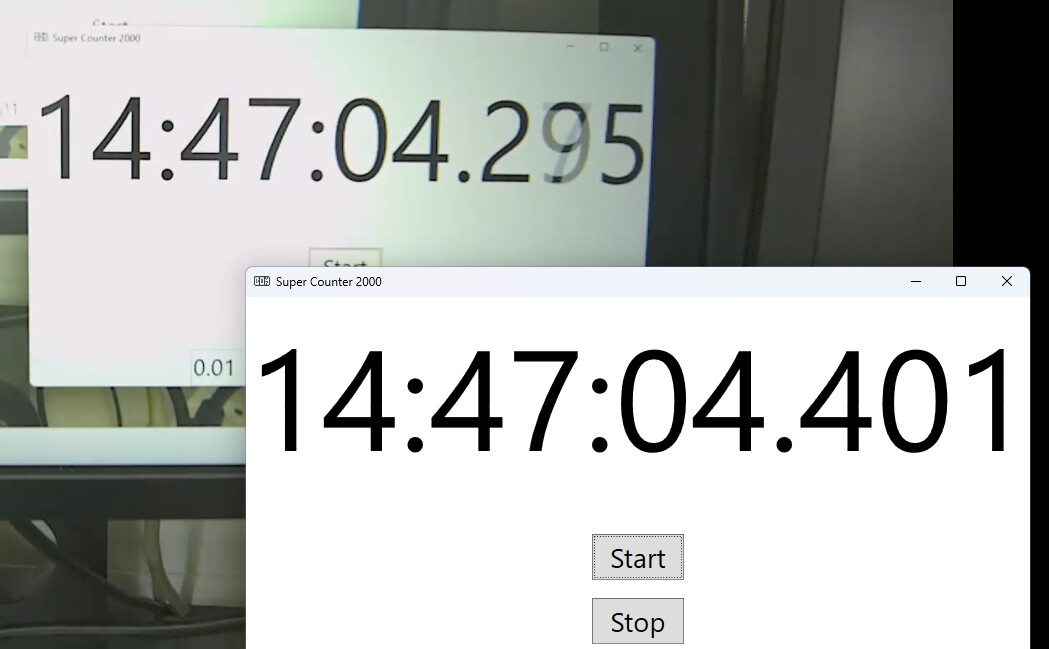
To measure the latency, I simply filmed the different screens (all 60Hz) this way :
For our application, a latency above 150ms is getting really annoying, the goal is to drive a machine in a FPV like way.
I found a related topic here : zedsrc low framerate with left+depth & object detection GST pipeline on Jetson Nano · Issue #16 · stereolabs/zed-gstreamer · GitHub
From my understanding, where the ZED SDK have to convert the video in BGRA format and have it in RAM memory in order to “perform all the elaborations”, the nvarguscamerasrc is directly able to work in the NVMM memory in NV12 format, which accelerates a lot the pipeline execution.
At a first glance, we could use the nvargus plugin. However, in the future we would like to use all the features brought by this wonderful SDK, in order to help the operator during his driving sessions.
Is there a way of getting the best of both worlds ? For example a way of retrieving the raw streams before the ZED SDK performs all the elaborations ?
I hope the following basic diagram could summarize what I mean :
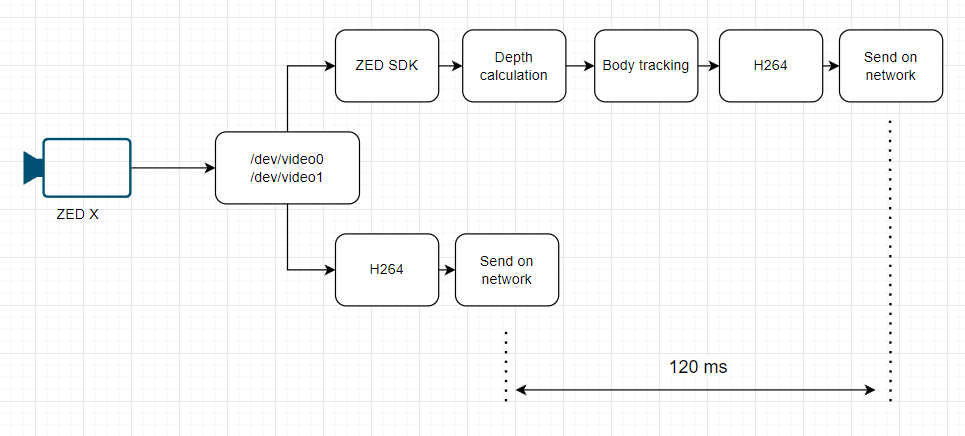
That wouldn’t be an issue to get depth and other information with 200-300ms latency, the problem is only about the real-time perception of the operator.
Thanks a lot for your time and your work.