Hi, I’m using ZED 2i to run a small demo by using ZED SDK 3.5.2 on windows.
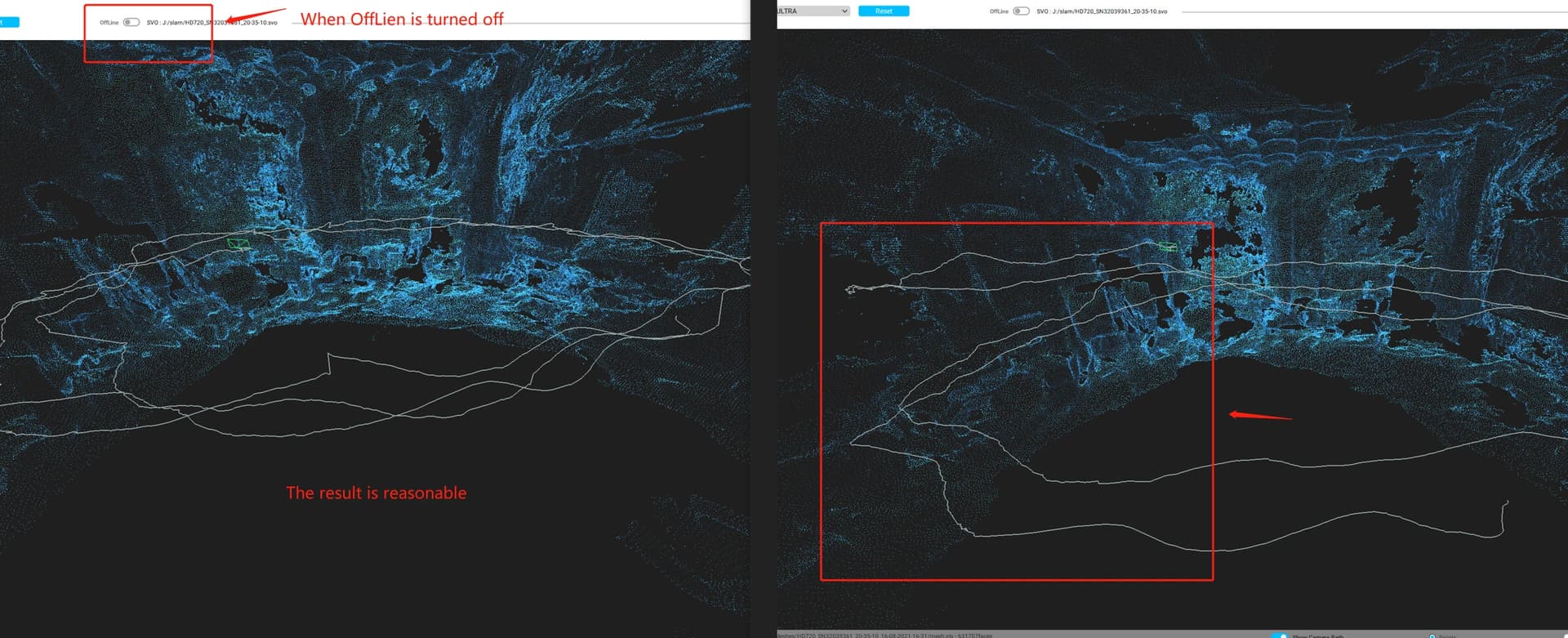
In the ZEDfu, When I turned on offline, the calculated trajectory showed a clear sign of upward drift.
Should this happen?
Best,
Geoff
Hi, I’m using ZED 2i to run a small demo by using ZED SDK 3.5.2 on windows.
In the ZEDfu, When I turned on offline, the calculated trajectory showed a clear sign of upward drift.
Should this happen?
Geoff
Hi,
Thanks for the feedback.
That should be indeed the opposite. Normally Offline mode is more precise for the tracking as it computes the trajectory in two pass.
We will take a look
Thanks a lot.
I can send you the svo file as well as the vedio recording for the whole process when running the ZEDfu, if you need that.
Best,
Hong
Any solution? We are both circling around the same problem, which is the inaccuracy of the vertical translational data