Hello,
We are currently using two ZED2i cameras in a ROS1 + ZED SDK 4 environment and are experiencing an intermittent but critical issue.
 Issue Description
Issue Description
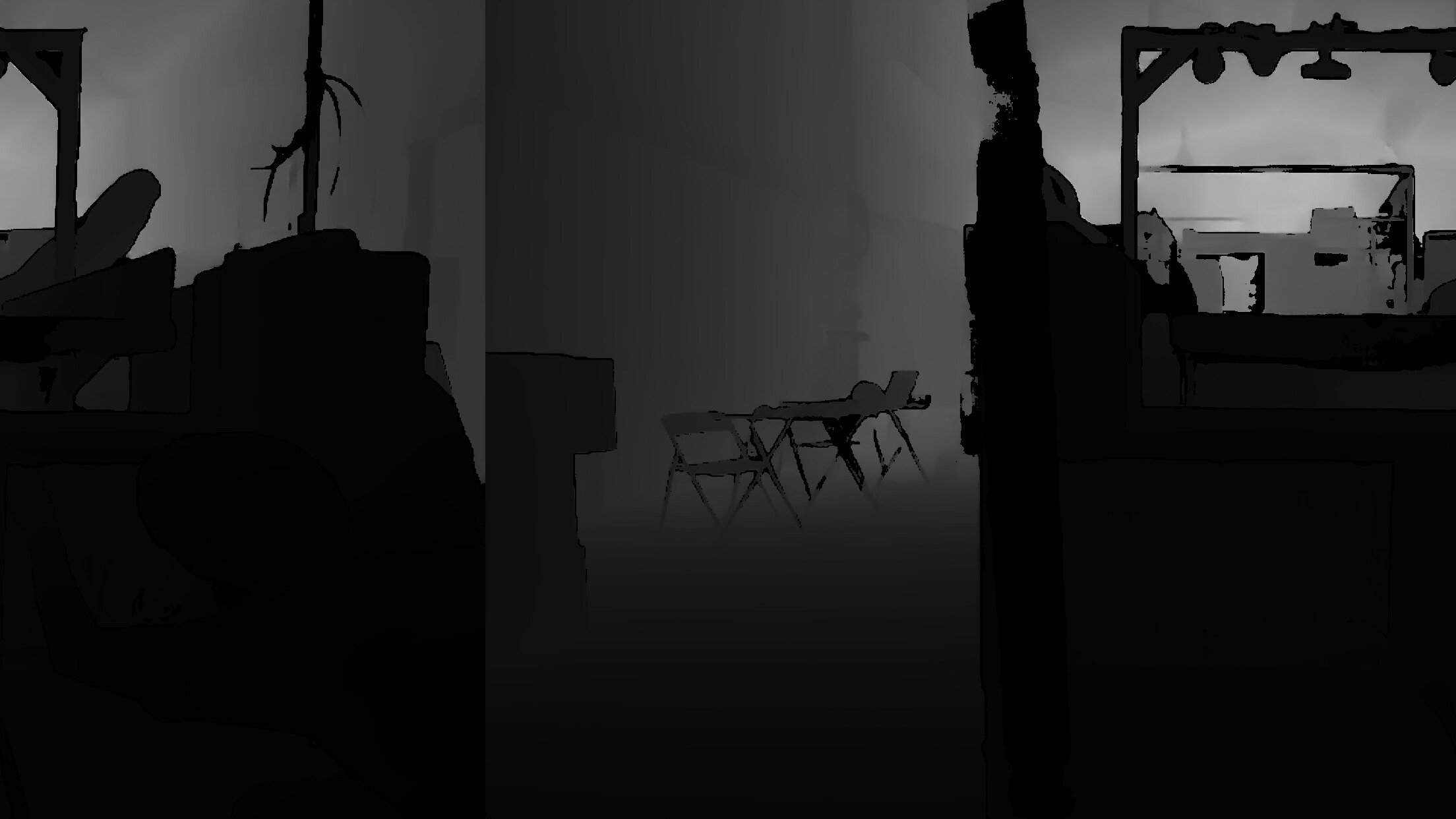
Occasionally, the image appears torn or inverted around the left 1/3 vertical region of the frame, as shown in the attached image.
This issue tends to occur more frequently during object detection tasks and is difficult to reproduce consistently. The affected region fluctuates within a ±15% range around the left 1/3 area, making it harder to isolate the root cause.
As a workaround, we tested reducing the resolution to HD720, which seems to reduce the frequency of the issue, but it still occurs occasionally. Therefore, the problem is likely not fully resolved by lowering resolution alone.
 System Setup
System Setup
- Cameras: 2 × ZED2i
- PC: Ubuntu 20.04, NVIDIA RTX 4060
- Connection: USB 3.0 (5m C-to-A cable; USB-C on camera side, USB-A on PC)
- SDK: ZED SDK 4.x
- ROS: ROS1 (Noetic)
- Camera Mode: Neural Plus, Resolution: 2K (also tested HD720)
 What We Are Looking For
What We Are Looking For
- Is there any known cause or workaround for this kind of image tearing and inversion, especially under long USB cables or Neural/Neural Plus modes?
- Within the ROS1 ecosystem, is there a recommended approach to detect and filter corrupted frames (e.g., analyzing image continuity, histogram anomalies, or checksum mismatch)?
- Are there any ZED SDK or USB reliability settings we can tune to reduce this issue further?
We would greatly appreciate any insights or advice on how to prevent or filter out such corrupted frames during runtime.