Hello, I’m using ZED1 on top of turtlebot, and trying to create map with ROS rtabmap package.
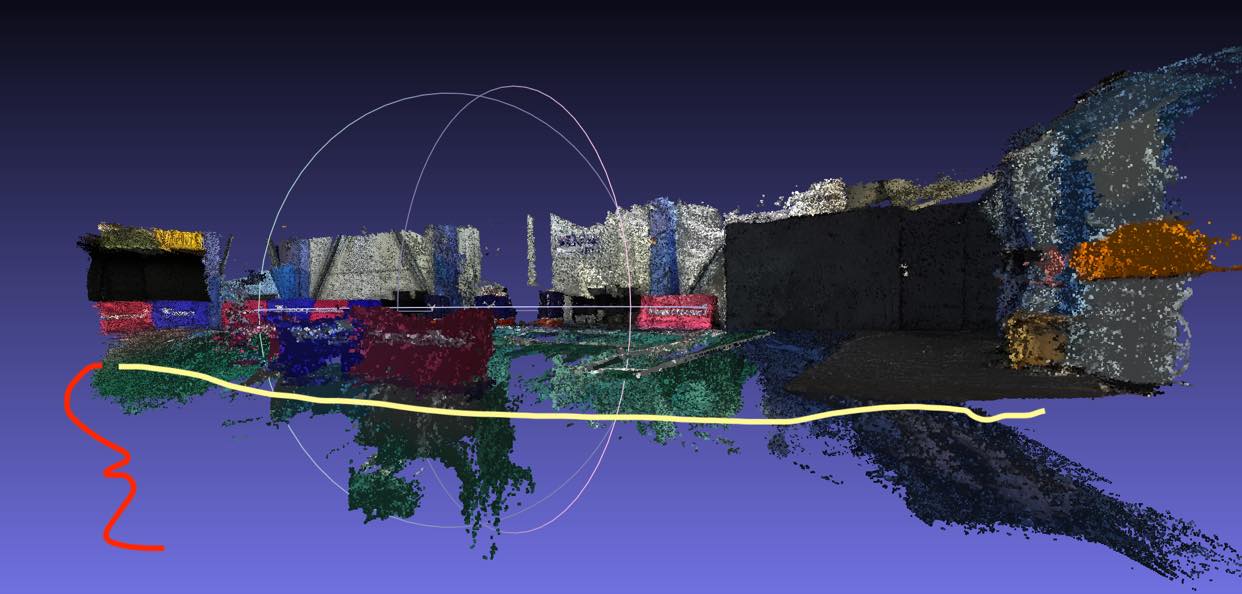
I generated pointcloud from the database, and it looks that lot of points that lay on the floor, are misaligned ( they are lower and further than they should be).
I calibrated the camera, but the result is the same.
Camera is mounted on robot at height 50cm from floor.
Do you have any ideas how to improve this?
This happened to me when surfaces are reflective of light and the light levels are high. I would either lower brightness of lights, or place something on the floor that is textured and not so reflective. Construction paper has helped me.
Thanks, but that’s not really helpful I don’t think light levels here we that high. I’m curious if structured light cameras such as realsense have these problems.
I found that ZED camera publishes confidence values on /zed/zed_node/confidence/confidence_map so I’ll try to filter the pointcloud based on these values and post if that works.
 I don’t think light levels here we that high. I’m curious if structured light cameras such as realsense have these problems.
I don’t think light levels here we that high. I’m curious if structured light cameras such as realsense have these problems.