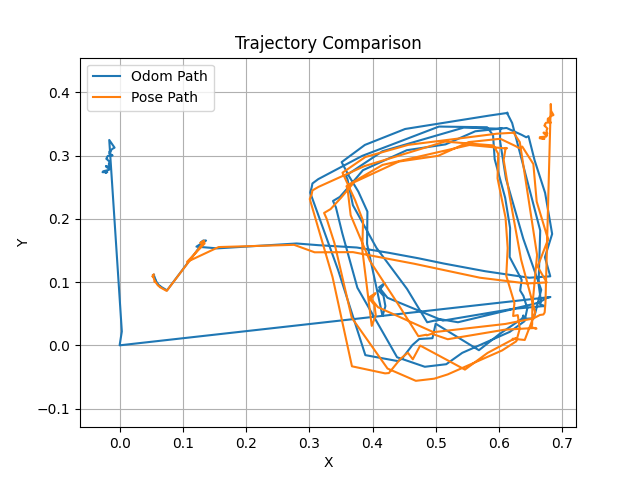
Greetings, I would like to know something. I am running Zed2i node in ROS2 version humble on jetson orin nano. what I had experience is that, the odom reading keep resetting into 0 value. Is this normal?. Here I attach one of the test where I just move the camera around in square motion you could see that the /zed/zed_node/odom reset back to zero.
best regard
thebestman
Yes, it is. It’s the default expected behavior when the parameter pos_tracking.reset_odom_with_loop_closure is set to true:
The effect of this behavior is to make the origin of the local odometry and the global position to the same value to reset odometry drift.