I’m following the procedure here. im using ./zedx_one_stereo_calibration. when I hit s to save the current frame, it seems like the application crashes out or is just so slow that the real time viewer doesn’t update anymore. has anyone else had this issue? im running on a jetson orin nx, and it isnt heating up excessively, so i should have the compute to do the simple task.
Hi @adinesh
Have you configured the example to match the features of your calibration board?
What you describe is normally caused by the code not detecting the board.
Please send a picture of the board that you are using and the settings.
Sure!
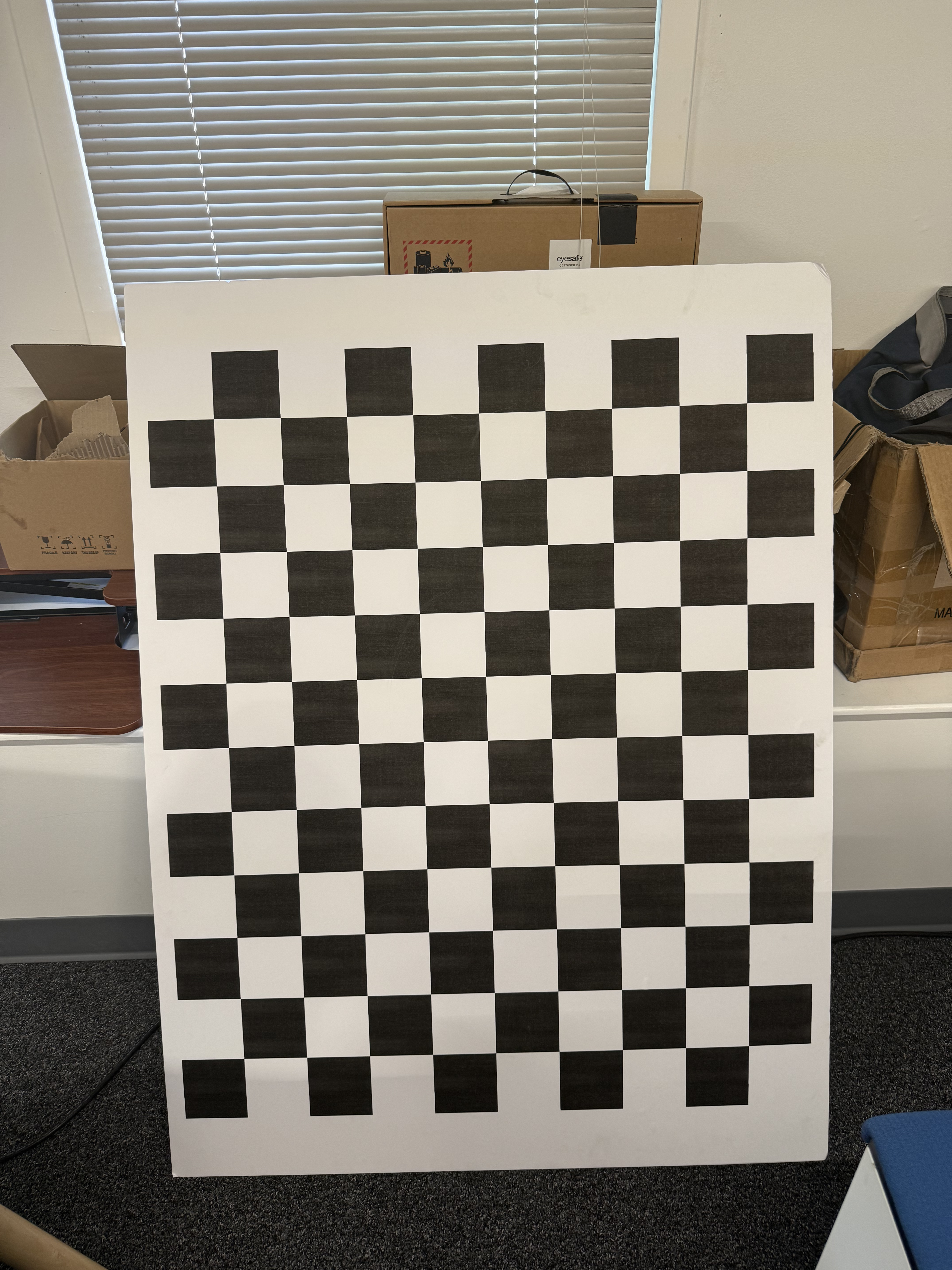
I can see in the real time viewer that >80% of the points are being found (looks close to 100%). My settings are:
int target_w = 11; // number of horizontal inner edges
int target_h = 9; // number of vertical inner edges
float square_size = 86.0; // mm
The slowness is mostly when I click ‘s’, it takes 3 minutes (timed) for those images to save (as showed in the terminal output). About halfway through the coverage process, I keep getting prompts that the “Application is not Responding”, but if I wait long enough, that does go away. So far, if I wait long enough, it ends up being ok.
Calibration parameters look correct.
What NVIDIA Jetson module are you using? Is the power mode set to MAXN, and the jetson_clocks.sh script running?
The power mode is set to MAXN_SUPER (checked via sudo jetson_clocks --show), and I have run sudo jetson_clocks. Let me know if either of those aren’t correct.
This is the jetson board i have (https://arkelectron.com/product/ark-just-a-jetson/?srsltid=AfmBOooyuHyCal7qWd_-hrmiBZtSH5tF-yzm6GsNQIGRyC7ng8Q6W6ML) - it’s a Jetson Orin NX.
What resolution are you using?
Interesting. This board is not officially supported by the ZED X Driver; it’s nice to know it works with it with no modifications.
1 Like