Hi,
I’m using ZED X Mini with Xavier NX underwater. I did calibration following tutorial How to Calibrate your ZED camera with OpenCV - Stereolabs, the rectified image looks quite good with no distortion, but the depth sensing is worse when running with calibration file than without calibration file.
This is the calibration file:
%YAML:1.0
---
Size: [ 1920, 1200 ]
K_LEFT: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 9.7311816613777467e+02, 0., 9.3729447371503773e+02, 0.,
9.6756339102779350e+02, 6.0698738433763651e+02, 0., 0., 1. ]
D_LEFT: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ 3.7689544395172730e-01, -9.6374269857492784e-02,
-1.6051414915441101e-02, -3.2471985330426232e-03,
7.9898016024009963e-02 ]
K_RIGHT: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 9.7279354472023931e+02, 0., 1.0040517634999151e+03, 0.,
9.6826025143913273e+02, 6.0659327864206830e+02, 0., 0., 1. ]
D_RIGHT: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ 3.7877927930441607e-01, -1.1095840898000960e-01,
-1.6212957651222260e-02, -3.5198699122780935e-03,
1.2172249019652885e-01 ]
R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 9.9999845623683359e-01, -1.7334635101399166e-03,
-2.8745122824488505e-04, 1.7335264510310428e-03,
9.9999847349253523e-01, 2.1885758573424923e-04,
2.8707140780964458e-04, -2.1935555217752296e-04,
9.9999993473657212e-01 ]
T: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [ -4.9590653986534068e-02, 5.5844406358709586e-06,
4.0890855087971948e-04 ]
WITHOUT calibration:
left unrectified
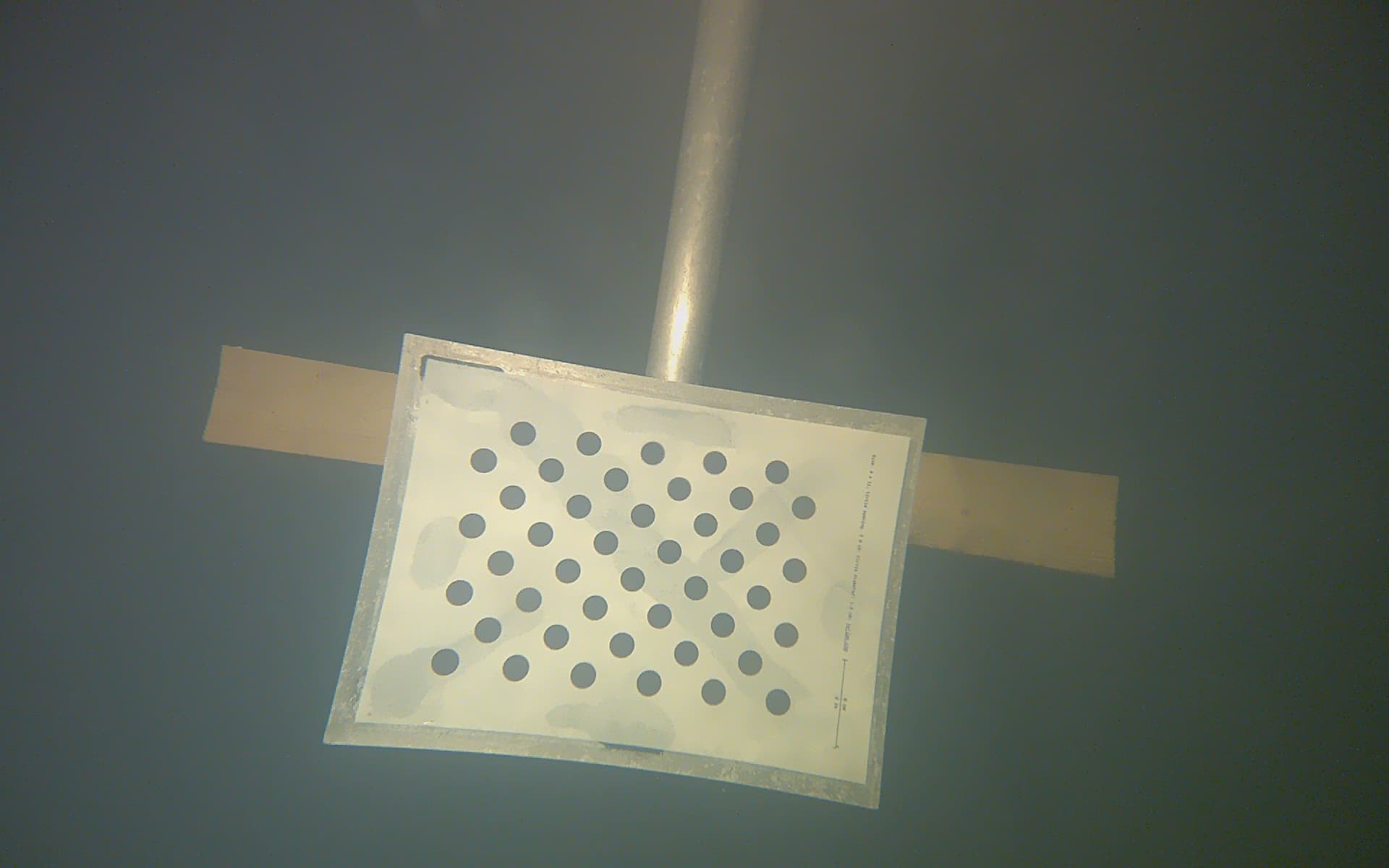
left rectified
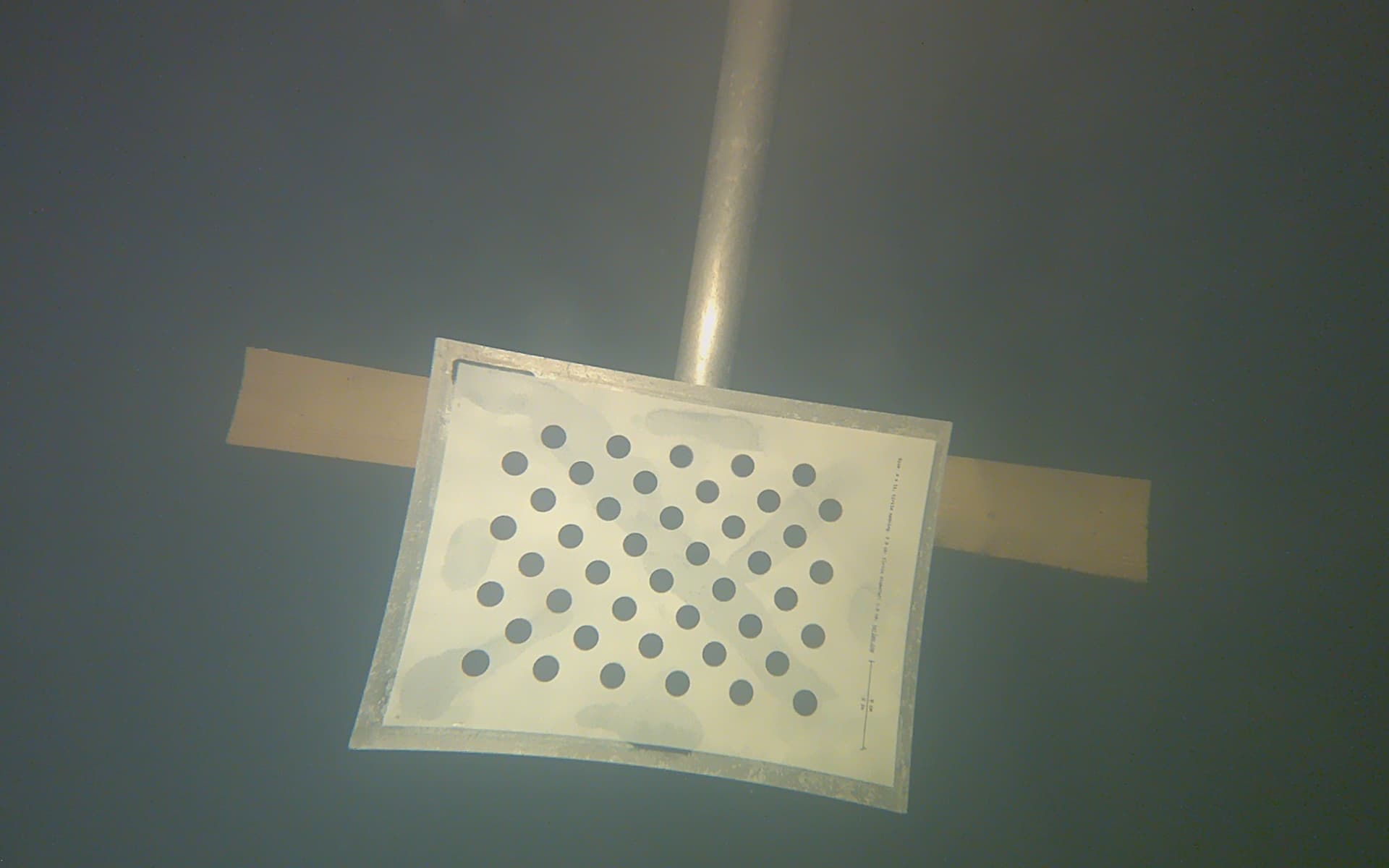
disparity

WITH calibration:
left unrectified
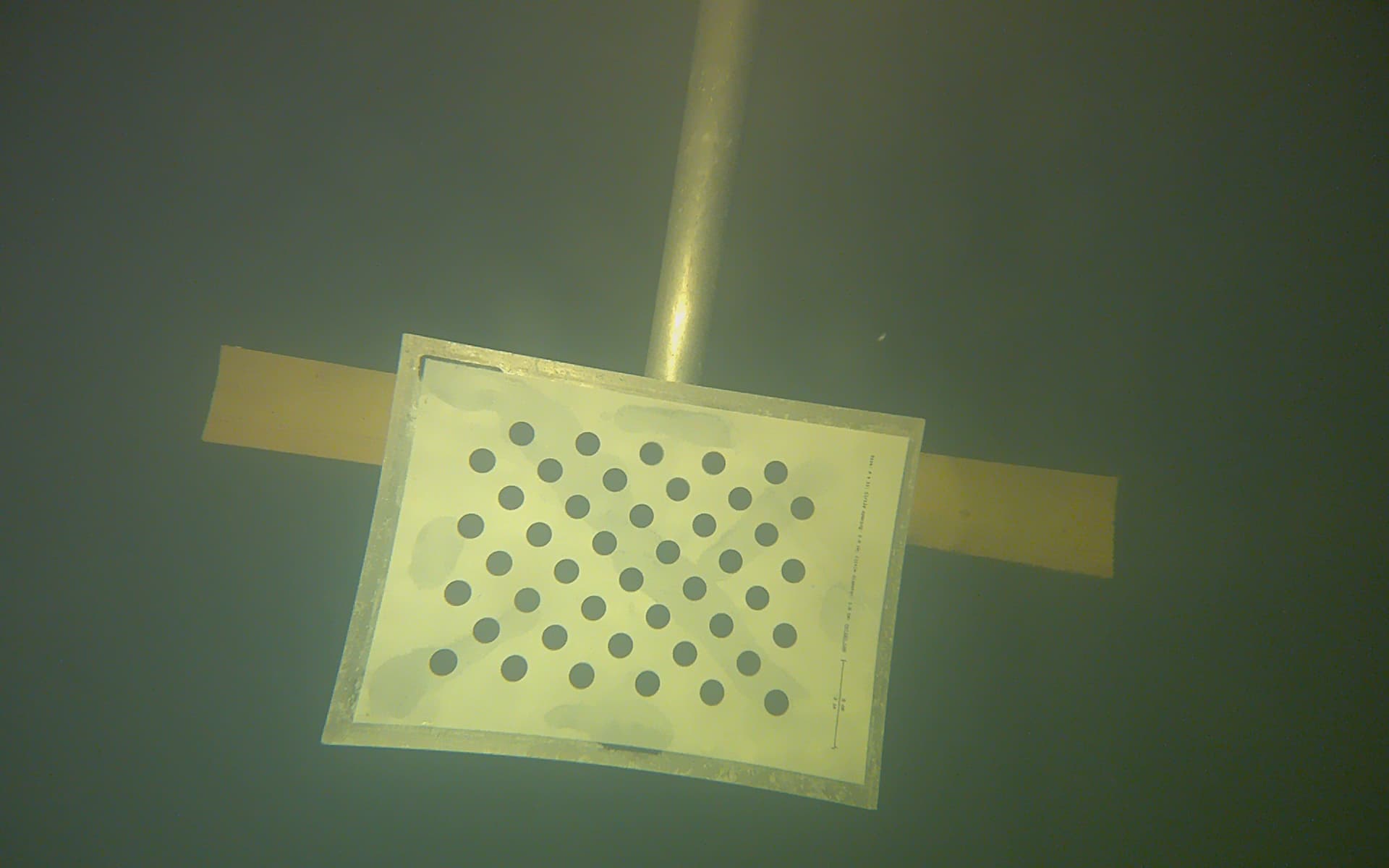
left rectified
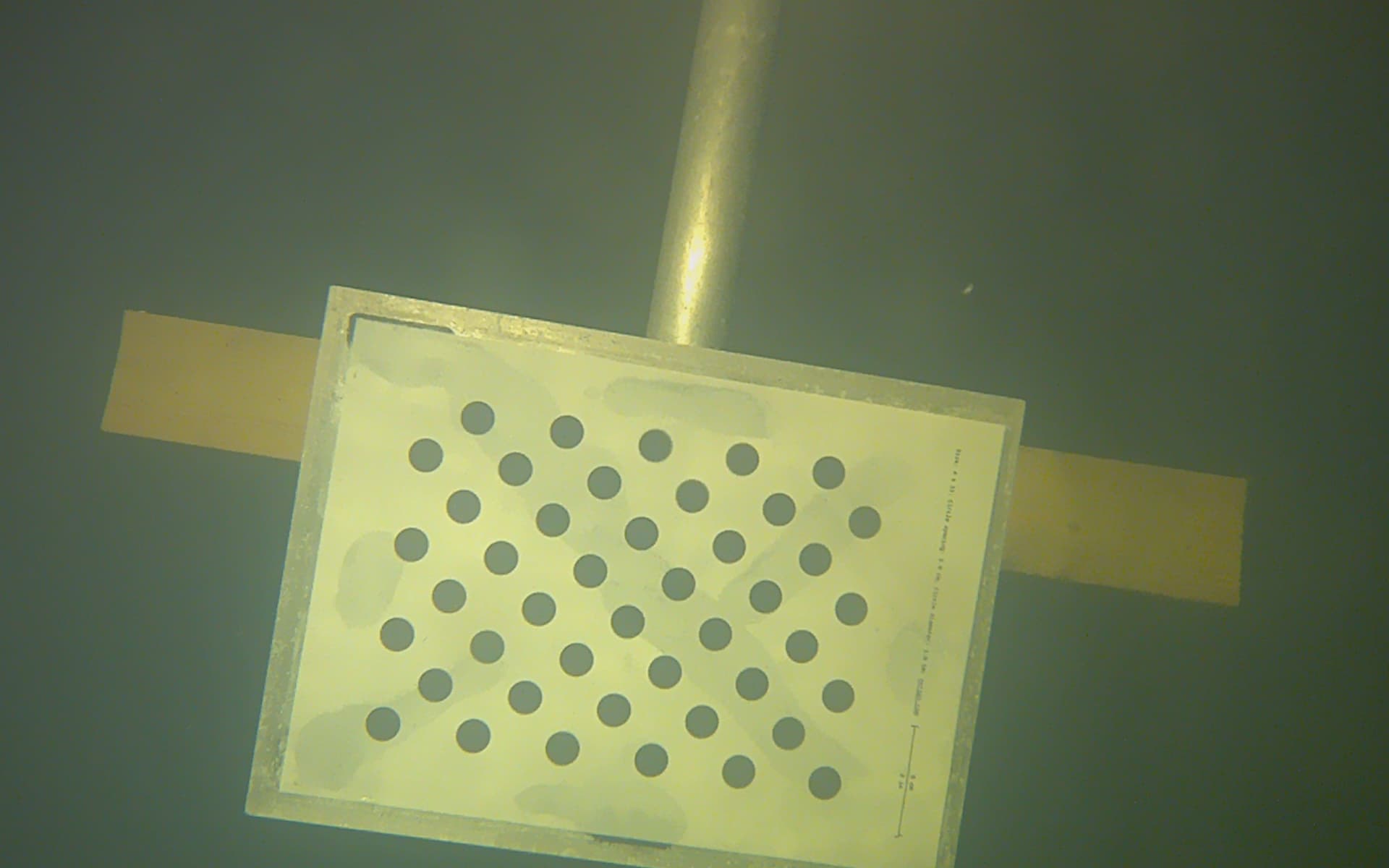
disparity
What can be the reason for this bad disparity? Thank you.