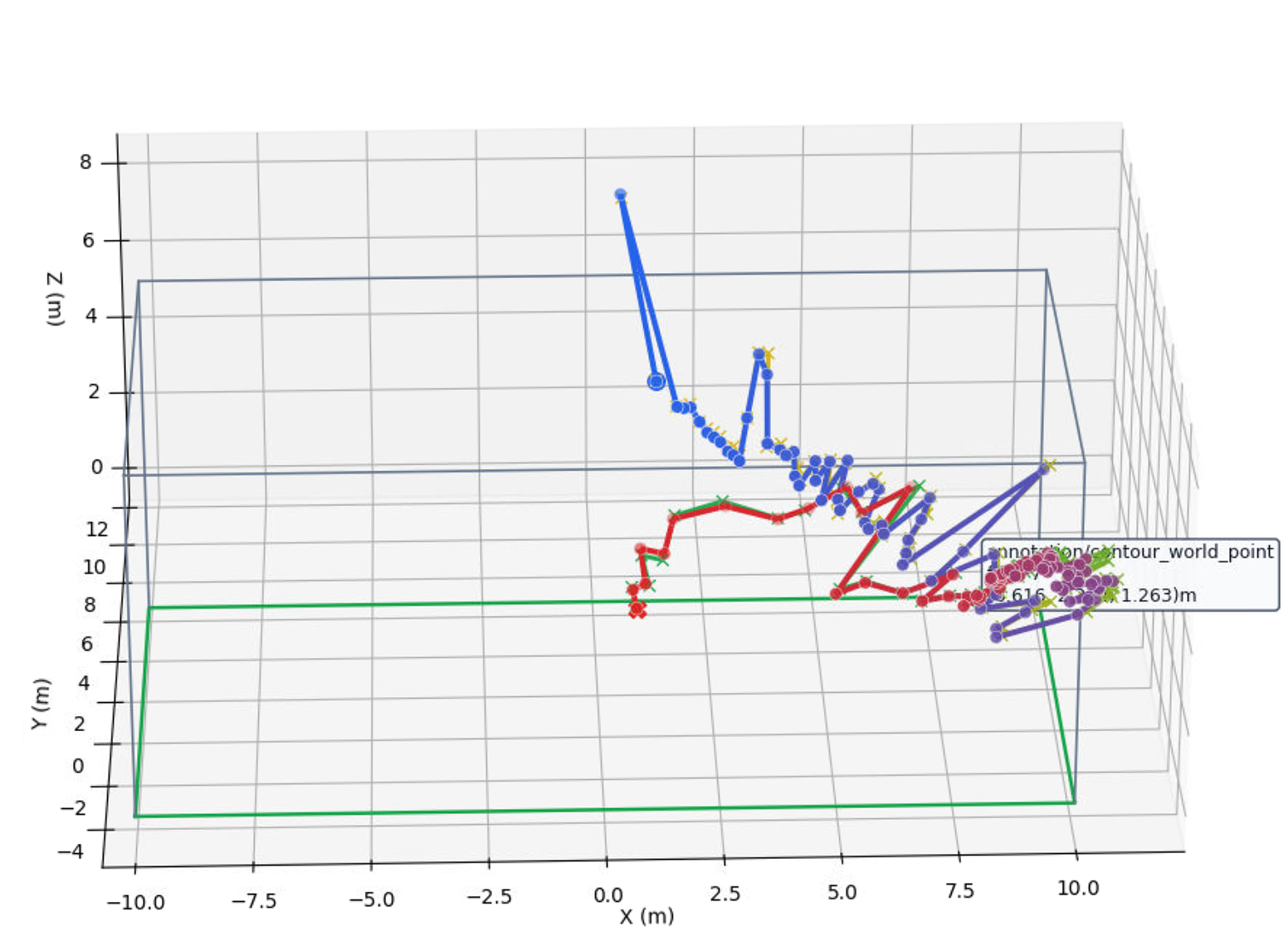
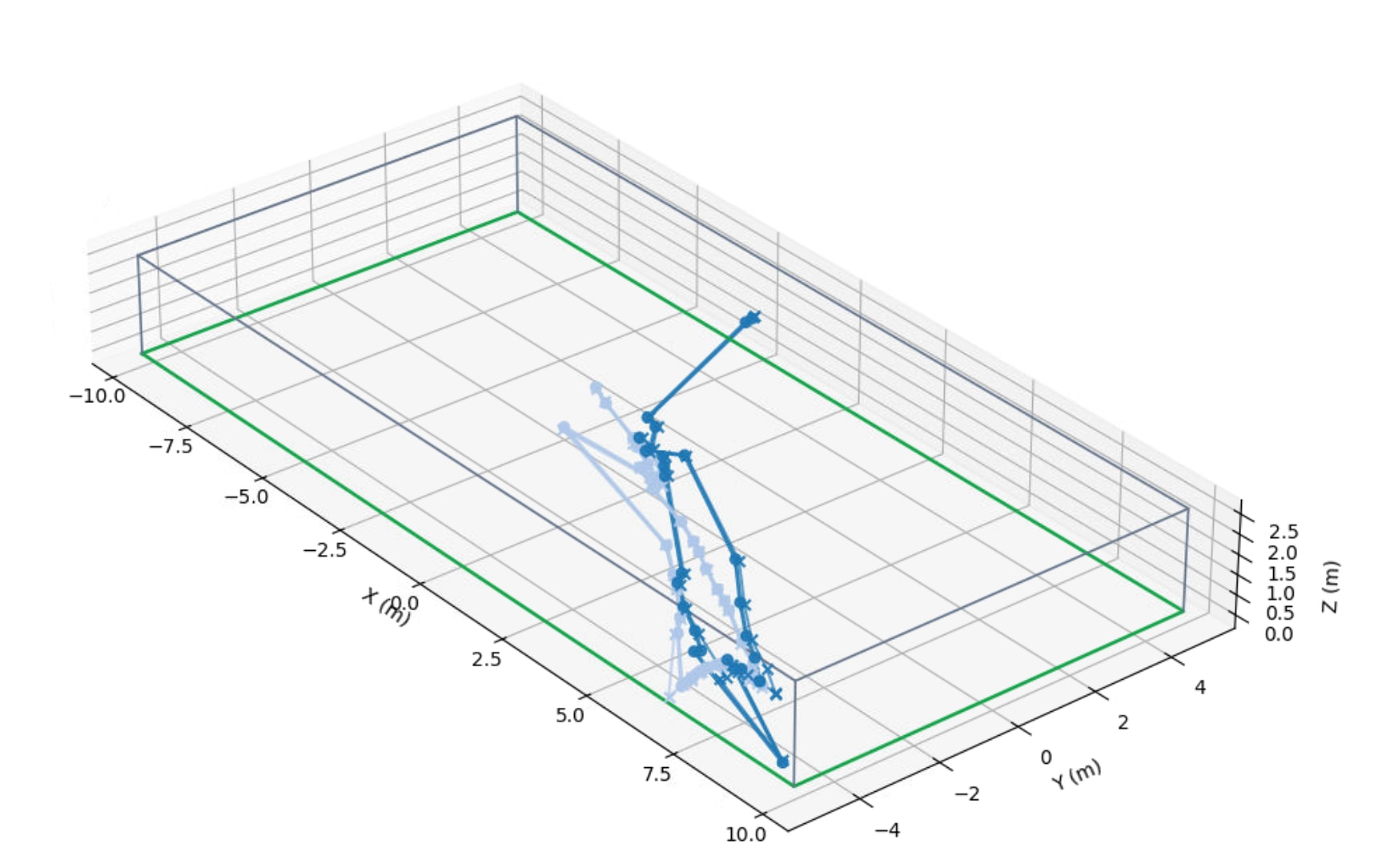
Here the ball comes from high and bounce on the ground then on the wall.
The camera has approximately the view of the plot.
We would expect a quite parabolic flight but instead get a saw pattern oscillating on the depth axis (roughly) with >1 meter error which is huge. The approximate distance is ~8 meters and
The depth is calculated using NEURAL_PLUS model.
Does that ring a bell? Is there some way I could improve the depth? I thought about some kind of smoothing but that’s not entierly satisfactory and I feel like we’re too far from the truth.
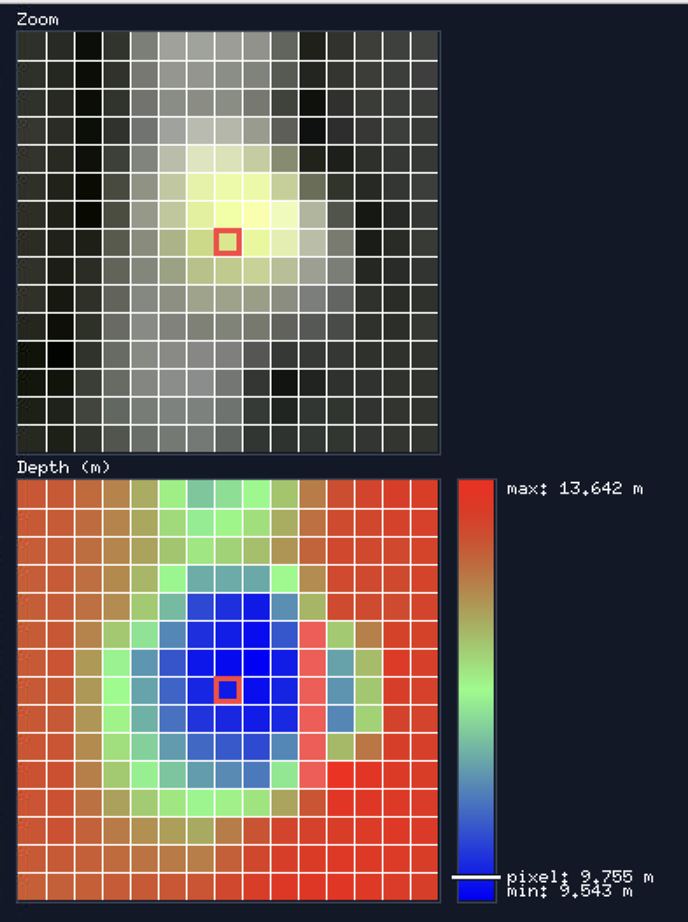
I made a viewer to see the RGB and Depth both zoomed around the cursor
I’ve been setting camera as static and tweaking stabilization with not much success. I see some changes, but improvements, if any, are order of magnitude lower that the depth error.
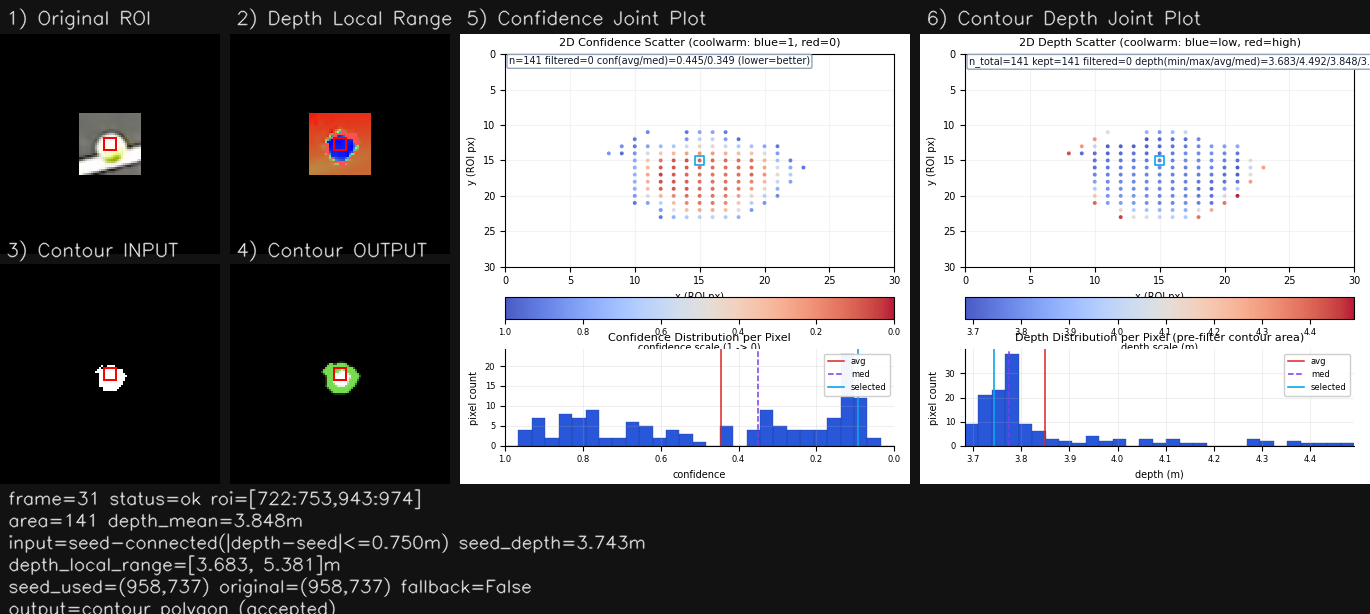
Ball position is annotated manually for now by selecting a click + aggregation of positions of the neighborhood (depth contour) => we see quite a local consensus over depth / confidence of the ball contour
Hi @abal
First of all, I recommend you install the latest ZED SDK v5.2.3.
Does this mean that you are analyzing recorded SVO data?
Please note that depth is not recorded in SVO, but only raw stereo and inertial sensor streams.
How do you extract the depth information? Do you get a single point value, or do you perform some kind of average?
We normally recommend using a median average, rejecting INF and NAN values.
What’s the size of the ball?
The depth accuracy at 10 m is ~4% with respect to the depth value, meaning +/- 40 cm of depth precision…
I’m not in real time and running on another machine with RTX3080 Ti. In fact, I’m annotating the video frame by frame by clicking on the ball. In fact, the interface waits on grab to actually display the image so by design, we are waiting for it to be available.
I’ve been wondering about applying kalman but then I thought this might also make the trajectory “rounder” eg. changing sharp direction changes into smoother curves, which is not really wanted. We would like to identifying which axis/3D vector holds the more error to apply more smoothing in that direction. Does that make sense?