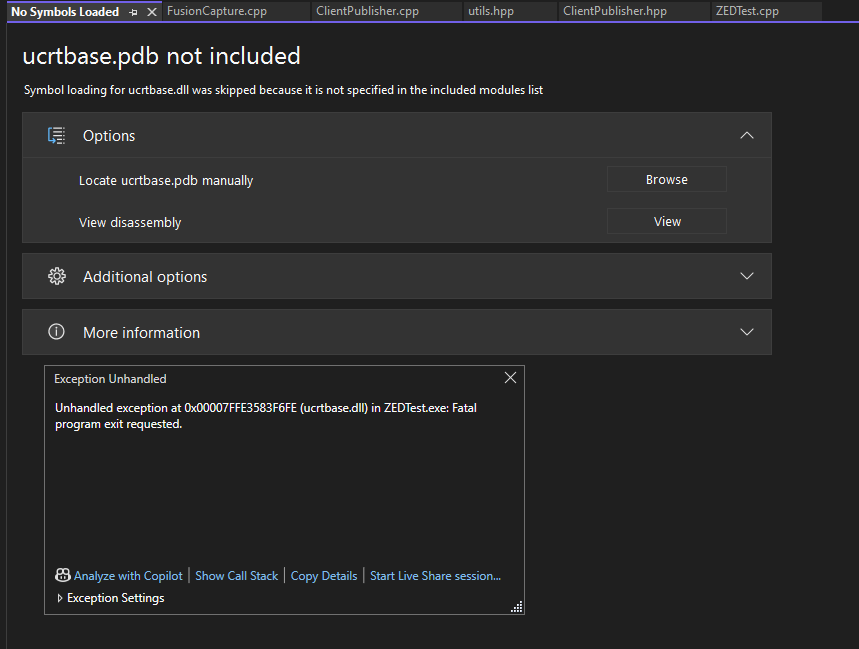
I am currently using the ZED SDK 5.0 in conjunction with two ZED 2i’s. I am experimenting using the Fusion API in C++ to perform some basic spatial mapping with the two cameras before I move on to more advanced use cases through the Fusion API. I’ve written some basic code, which I will attach below, with some minor tweaks while referring to the examples provided in the Git repository. However, every time I run the code, I get an unhandled exception saying “ucrtbase.pdb not included”. I predominantly use the Python version of the API to develop, and I believe not all of the Fusion API is ported to Python as of yet? As I could not access certain methods that are accessible through the C++ API. I have more experience using the Python API and very little using the C++ side of things. I wanted to know if anyone else was facing this issue, and if so, what they did to counter it. Any help would be appreciated.
Kind regards
# The header files ClientPublisher and utils are directly copied from the ZED SDK repository on GitHub
#include "ClientPublisher.hpp"
#include "utils.hpp"
#include <chrono>
#include <thread>
static const int CAPTURE_DURATION = 1;
static void FusionCapture()
{
constexpr sl::COORDINATE_SYSTEM COORDINATE_SYSTEM = sl::COORDINATE_SYSTEM::RIGHT_HANDED_Y_UP;
constexpr sl::UNIT UNIT = sl::UNIT::METER;
auto configuration = sl::readFusionConfigurationFile("TestCalibration.json", COORDINATE_SYSTEM, UNIT);
if (configuration.empty())
{
std::cout << "Empty configuration file" << std::endl;
return;
}
std::vector<ClientPublisher> clients(configuration.size());
int id = 0;
std::map<int, std::string> svoFiles;
for (auto conf : configuration)
{
if (conf.communication_parameters.getType() == sl::CommunicationParameters::COMM_TYPE::INTRA_PROCESS)
{
std::cout << "Try to open ZED " << conf.serial_number << ".." << std::flush;
auto state = clients[id].open(conf.input_type);
if (!state)
{
std::cerr << "Could not open ZED: " << conf.input_type.getConfiguration() << ". Skipping..." << std::endl;
continue;
}
if (conf.input_type.getType() == sl::InputType::INPUT_TYPE::SVO_FILE)
{
svoFiles.insert(std::make_pair(id, conf.input_type.getConfiguration()));
}
std::cout << "Ready!" << std::endl;
id++;
}
}
bool enableSVOSync = (svoFiles.size() > 1);
if (enableSVOSync)
{
std::cout << "Starting SVO Sync Process..." << std::endl;
std::map <int, int> cam_idx_to_svo_frame_idx = syncDATA(svoFiles);
for (auto& it : cam_idx_to_svo_frame_idx)
{
std::cout << "Setting camera " << it.first << " to frame " << it.second << std::endl;
clients[it.first].setStartSVOPosition(it.second);
}
}
for (auto& it : clients)
{
it.start();
}
sl::InitFusionParameters initParameters;
initParameters.coordinate_units = UNIT;
initParameters.coordinate_system = COORDINATE_SYSTEM;
initParameters.verbose = true;
sl::Fusion fusion;
auto state = fusion.init(initParameters);
if (state != sl::FUSION_ERROR_CODE::SUCCESS)
{
std::cout << "Error Init " << state << std::endl;
return;
}
std::vector <sl::CameraIdentifier> cameras;
for (auto& it : configuration)
{
sl::CameraIdentifier uuid(it.serial_number);
auto state = fusion.subscribe(uuid, it.communication_parameters, it.pose, it.override_gravity);
if (state != sl::FUSION_ERROR_CODE::SUCCESS)
{
std::cout << "Unable to subscribe to " << std::to_string(uuid.sn) << " . " << state << std::endl;
}
else
{
cameras.push_back(uuid);
}
}
if (cameras.empty())
{
std::cout << "No connections" << std::endl;
return;
}
sl::PositionalTrackingFusionParameters positionalTrackingParameters;
state = fusion.enablePositionalTracking(positionalTrackingParameters);
if (state != sl::FUSION_ERROR_CODE::SUCCESS)
{
std::cout << "Error Positional Tracking" << state << std::endl;
return;
}
sl::SpatialMappingFusionParameters spatialMappingParameters;
spatialMappingParameters.map_type = sl::SpatialMappingParameters::SPATIAL_MAP_TYPE::MESH;
sl::Mesh map;
spatialMappingParameters.set(sl::SpatialMappingParameters::MAPPING_RANGE::SHORT);
spatialMappingParameters.set(sl::SpatialMappingParameters::MAPPING_RESOLUTION::HIGH);
spatialMappingParameters.use_chunk_only = true;
spatialMappingParameters.stability_counter = 4;
state = fusion.enableSpatialMapping(spatialMappingParameters);
if (state != sl::FUSION_ERROR_CODE::SUCCESS)
{
std::cout << "Error Spatial Mapping" << state << std::endl;
return;
}
sl::Timestamp lastUpdate = 0;
bool waitForMesh = false;
auto startTime = std::chrono::high_resolution_clock::now();
while (true)
{
auto now = std::chrono::high_resolution_clock::now();
double elapsedSeconds = std::chrono::duration<double>(now - startTime).count();
if (elapsedSeconds > CAPTURE_DURATION)
{
break;
}
if (fusion.process() == sl::FUSION_ERROR_CODE::SUCCESS)
{
auto ts = sl::getCurrentTimeStamp();
if (!waitForMesh && (ts.getMilliseconds() - lastUpdate.getMilliseconds() > 100))
{
fusion.requestSpatialMapAsync();
waitForMesh = true;
}
if (waitForMesh && fusion.getSpatialMapRequestStatusAsync() == sl::FUSION_ERROR_CODE::SUCCESS)
{
fusion.retrieveSpatialMapAsync(map);
waitForMesh = false;
lastUpdate = ts;
}
}
}
map.save("Map.ply", sl::MESH_FILE_FORMAT::PLY);
for (auto& it : clients)
{
it.stop();
}
fusion.close();
return;
}