You can ignore those dependency errors if you do not plan to use specific packages.
They are caused by a not full compatibility with Foxy which is no more supported a “not LTS” distribution.
Can you build the packages with colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release --parallel-workers $(nproc)?
I need the zed_depth_to_laserscan example. So I tried to install as many packages as possible from the rosdep dependencies list.
This is the result of building rosdep and colcon.
root@ubuntu:~/zed2/ros2_ws# rosdep install --from-paths src --ignore-src -r -y
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
ugv_sdk: Cannot locate rosdep definition for [catkin]
smac_planner: Cannot locate rosdep definition for [ompl]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully
root@ubuntu:~/zed2/ros2_ws# colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
[1.451s] WARNING:colcon.colcon_core.package_selection:Some selected packages are already built in one or more underlay workspaces:
'nav2_map_server' is in: /root/zed2/ros2_ws/install/nav2_map_server, /opt/ros/foxy
'pcl_conversions' is in: /root/zed2/ros2_ws/install/pcl_conversions, /opt/ros/foxy
'nav2_bringup' is in: /root/zed2/ros2_ws/install/nav2_bringup, /opt/ros/foxy
'nav2_common' is in: /root/zed2/ros2_ws/install/nav2_common, /opt/ros/foxy
'octomap_msgs' is in: /root/zed2/ros2_ws/install/octomap_msgs, /opt/ros/foxy
'navigation2' is in: /root/zed2/ros2_ws/install/navigation2, /opt/ros/foxy
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.
If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding nav2_bringup nav2_common nav2_map_server navigation2 octomap_msgs pcl_conversions
This may be promoted to an error in a future release of colcon-override-check.
Starting >>> nav2_common
Starting >>> grid_map_cmake_helpers
Starting >>> filters
Starting >>> nav_2d_msgs
Starting >>> zed_interfaces
Starting >>> octomap_msgs
Starting >>> pcl_conversions
Starting >>> zed_topic_benchmark_interfaces
Starting >>> scout_description
Starting >>> scout_msgs
Starting >>> ugv_sdk
Starting >>> nav2_gazebo_spawner
Finished <<< zed_topic_benchmark_interfaces [2.41s]
Starting >>> zed_topic_benchmark_component
Finished <<< grid_map_cmake_helpers [2.75s]
Finished <<< scout_description [2.54s]
Starting >>> grid_map_core
Starting >>> grid_map_msgs
Finished <<< pcl_conversions [2.76s]
Finished <<< nav2_common [2.99s]
Starting >>> nav2_msgs
Starting >>> nav2_voxel_grid
Finished <<< filters [3.98s]
Starting >>> pcl_ros
Finished <<< ugv_sdk [3.95s]
Starting >>> zed_tutorial_depth
Finished <<< zed_topic_benchmark_component [1.75s]
Starting >>> zed_tutorial_pos_tracking
Finished <<< nav2_gazebo_spawner [4.73s]
Starting >>> zed_tutorial_video
Finished <<< nav2_voxel_grid [2.24s]
Starting >>> zed_topic_benchmark
Finished <<< pcl_ros [1.79s]
Starting >>> perception_pcl
Finished <<< zed_tutorial_depth [1.71s]
Finished <<< octomap_msgs [5.88s]
Starting >>> octomap_server2
Finished <<< zed_tutorial_pos_tracking [1.82s]
Finished <<< scout_msgs [6.09s]
Starting >>> scout_base
Finished <<< zed_topic_benchmark [1.27s]
Finished <<< nav_2d_msgs [6.65s]
Finished <<< zed_tutorial_video [1.69s]
Starting >>> dwb_msgs
Finished <<< grid_map_core [4.02s]
Starting >>> grid_map_cv
Starting >>> grid_map_octomap
Starting >>> grid_map_sdf
Finished <<< perception_pcl [1.46s]
Finished <<< octomap_server2 [1.85s]
Finished <<< scout_base [1.56s]
Finished <<< grid_map_octomap [1.69s]
Finished <<< grid_map_sdf [1.71s]
Finished <<< grid_map_cv [1.86s]
Finished <<< grid_map_msgs [5.94s]
Finished <<< zed_interfaces [10.1s]
Starting >>> zed_components
Starting >>> rviz_plugin_zed_od
Finished <<< zed_components [1.03s]
Starting >>> zed_wrapper
Starting >>> zed_aruco_localization
Starting >>> zed_rgb_convert
Finished <<< dwb_msgs [4.71s]
Finished <<< rviz_plugin_zed_od [1.35s]
Finished <<< zed_aruco_localization [0.85s]
Finished <<< nav2_msgs [9.24s]
Starting >>> nav2_util
Starting >>> grid_map_ros
Finished <<< zed_wrapper [1.11s]
Starting >>> zed_depth_to_laserscan
Starting >>> zed_multi_camera
Starting >>> zed_robot_integration
Starting >>> zed_ros2
Finished <<< zed_rgb_convert [1.77s]
Finished <<< zed_depth_to_laserscan [1.15s]
Finished <<< zed_multi_camera [1.13s]
Finished <<< zed_robot_integration [1.16s]
Finished <<< zed_ros2 [1.16s]
Finished <<< nav2_util [1.59s]
Starting >>> nav_2d_utils
Starting >>> nav2_behavior_tree
Starting >>> nav2_lifecycle_manager
Starting >>> nav2_map_server
Starting >>> nav2_amcl
Starting >>> nav2_waypoint_follower
Finished <<< grid_map_ros [1.81s]
Starting >>> grid_map_rviz_plugin
Starting >>> grid_map_filters
Starting >>> grid_map_loader
Starting >>> grid_map_visualization
Starting >>> grid_map_pcl
Finished <<< nav_2d_utils [3.07s]
Finished <<< nav2_lifecycle_manager [3.15s]
Starting >>> nav2_rviz_plugins
Finished <<< nav2_waypoint_follower [3.19s]
Finished <<< grid_map_loader [3.00s]
Finished <<< nav2_amcl [3.38s]
Finished <<< grid_map_rviz_plugin [3.32s]
Starting >>> zed_display_rviz2
Finished <<< nav2_map_server [3.68s]
Starting >>> nav2_costmap_2d
Finished <<< grid_map_visualization [3.41s]
Finished <<< grid_map_pcl [3.33s]
Finished <<< grid_map_filters [3.83s]
Starting >>> grid_map_demos
Finished <<< zed_display_rviz2 [0.94s]
Finished <<< nav2_rviz_plugins [1.69s]
Finished <<< nav2_behavior_tree [5.10s]
Starting >>> nav2_bt_navigator
Finished <<< nav2_costmap_2d [2.43s]
Starting >>> nav2_core
Starting >>> costmap_queue
Starting >>> grid_map_costmap_2d
Finished <<< nav2_bt_navigator [1.20s]
Finished <<< grid_map_demos [2.12s]
Starting >>> grid_map
Finished <<< nav2_core [0.76s]
Starting >>> dwb_core
Starting >>> nav2_controller
Starting >>> nav2_navfn_planner
Starting >>> nav2_planner
Starting >>> nav2_recoveries
Starting >>> nav2_regulated_pure_pursuit_controller
Starting >>> smac_planner
Finished <<< grid_map [1.29s]
Finished <<< grid_map_costmap_2d [1.79s]
Finished <<< costmap_queue [1.89s]
Finished <<< nav2_navfn_planner [1.82s]
Finished <<< nav2_planner [1.92s]
Finished <<< dwb_core [2.06s]
Starting >>> dwb_critics
Starting >>> dwb_plugins
Finished <<< nav2_regulated_pure_pursuit_controller [2.01s]
Finished <<< nav2_recoveries [2.08s]
Finished <<< nav2_controller [2.24s]
Finished <<< smac_planner [2.20s]
Finished <<< dwb_plugins [1.25s]
Finished <<< dwb_critics [1.33s]
Starting >>> nav2_dwb_controller
Finished <<< nav2_dwb_controller [0.73s]
Starting >>> navigation2
Finished <<< navigation2 [0.84s]
Starting >>> nav2_bringup
Finished <<< nav2_bringup [0.85s]
Starting >>> nav2_system_tests
Finished <<< nav2_system_tests [1.27s]
Summary: 73 packages finished [29.1s]
(terminal2) ros2 launch zed_depth_to_laserscan zed_depth_to_laserscan.launch.py camera_model:=zed2
The log that appears in the terminal window after execution is as follows.
[INFO] [launch]: All log files can be found below /root/.ros/log/2024-06-01-04-52-42-171876-ubuntu-171206
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [rviz2-1]: process started with pid [171284]
[INFO] [robot_state_publisher-2]: process started with pid [171286]
[INFO] [component_container-3]: process started with pid [171288]
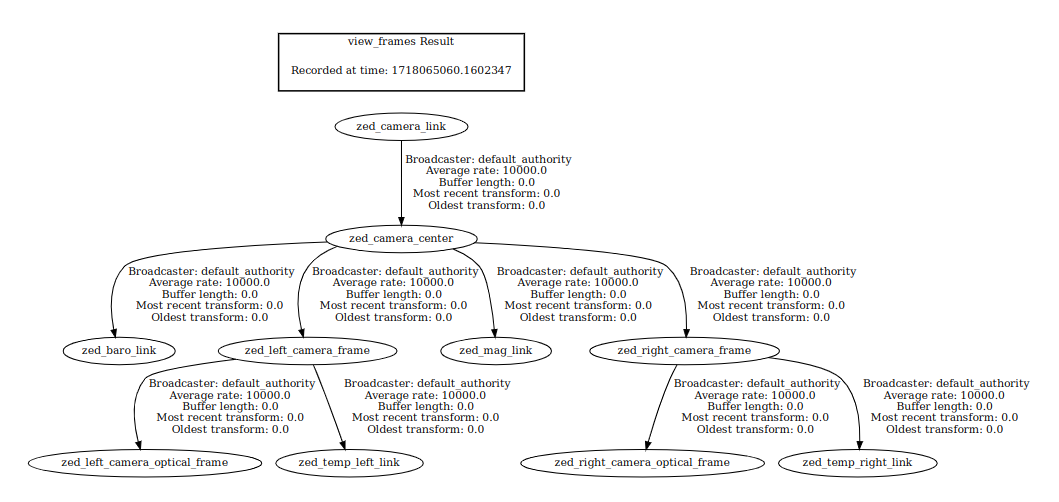
[robot_state_publisher-2] Parsing robot urdf xml string.
[robot_state_publisher-2] Link zed_camera_center had 4 children
[robot_state_publisher-2] Link zed_baro_link had 0 children
[robot_state_publisher-2] Link zed_left_camera_frame had 2 children
[robot_state_publisher-2] Link zed_left_camera_optical_frame had 0 children
[robot_state_publisher-2] Link zed_temp_left_link had 0 children
[robot_state_publisher-2] Link zed_mag_link had 0 children
[robot_state_publisher-2] Link zed_right_camera_frame had 2 children
[robot_state_publisher-2] Link zed_right_camera_optical_frame had 0 children
[robot_state_publisher-2] Link zed_temp_right_link had 0 children
[robot_state_publisher-2] [INFO] [1717217562.670356026] [zed.zed_state_publisher]: got segment zed_baro_link
[robot_state_publisher-2] [INFO] [1717217562.670675614] [zed.zed_state_publisher]: got segment zed_camera_center
[robot_state_publisher-2] [INFO] [1717217562.670708767] [zed.zed_state_publisher]: got segment zed_camera_link
[robot_state_publisher-2] [INFO] [1717217562.670722367] [zed.zed_state_publisher]: got segment zed_left_camera_frame
[robot_state_publisher-2] [INFO] [1717217562.670732095] [zed.zed_state_publisher]: got segment zed_left_camera_optical_frame
[robot_state_publisher-2] [INFO] [1717217562.670740767] [zed.zed_state_publisher]: got segment zed_mag_link
[robot_state_publisher-2] [INFO] [1717217562.670749439] [zed.zed_state_publisher]: got segment zed_right_camera_frame
[robot_state_publisher-2] [INFO] [1717217562.670757279] [zed.zed_state_publisher]: got segment zed_right_camera_optical_frame
[robot_state_publisher-2] [INFO] [1717217562.670765279] [zed.zed_state_publisher]: got segment zed_temp_left_link
[robot_state_publisher-2] [INFO] [1717217562.670772992] [zed.zed_state_publisher]: got segment zed_temp_right_link
[rviz2-1] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[component_container-3] [INFO] [1717217562.853382593] [zed.zed_depth_to_laserscan]: Load Library: /root/zed2/ros2_ws/install/zed_components/lib/libzed_camera_component.so
[component_container-3] [INFO] [1717217562.969021354] [zed.zed_depth_to_laserscan]: Found class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
[component_container-3] [INFO] [1717217562.969133483] [zed.zed_depth_to_laserscan]: Instantiate class: rclcpp_components::NodeFactoryTemplate<stereolabs::ZedCamera>
[component_container-3] [INFO] [1717217562.980143832] [zed.zed_node]: ********************************
[component_container-3] [INFO] [1717217562.980227801] [zed.zed_node]: ZED Camera Component
[component_container-3] [INFO] [1717217562.980249305] [zed.zed_node]: ********************************
[component_container-3] [INFO] [1717217562.980263226] [zed.zed_node]: * namespace: /zed
[component_container-3] [INFO] [1717217562.980274810] [zed.zed_node]: * node name: zed_node
[component_container-3] [INFO] [1717217562.980284890] [zed.zed_node]: ********************************
[component_container-3] [INFO] [1717217562.980321530] [zed.zed_node]: *** DEBUG parameters ***
[component_container-3] [INFO] [1717217562.980433276] [zed.zed_node]: * SDK Verbose: 1
[component_container-3] [INFO] [1717217562.980509213] [zed.zed_node]: * Debug Common: FALSE
[component_container-3] [INFO] [1717217562.980672159] [zed.zed_node]: * Debug Simulation: FALSE
[component_container-3] [INFO] [1717217562.980893954] [zed.zed_node]: * Debug Video/Depth: FALSE
[component_container-3] [INFO] [1717217562.981028803] [zed.zed_node]: * Debug Control settings: FALSE
[component_container-3] [INFO] [1717217562.981380072] [zed.zed_node]: * Debug Point Cloud: FALSE
[component_container-3] [INFO] [1717217562.981718540] [zed.zed_node]: * Debug GNSS: FALSE
[component_container-3] [INFO] [1717217562.982044848] [zed.zed_node]: * Debug Positional Tracking: FALSE
[component_container-3] [INFO] [1717217562.982158482] [zed.zed_node]: * Debug sensors: FALSE
[component_container-3] [INFO] [1717217562.982274707] [zed.zed_node]: * Debug Mapping: FALSE
[component_container-3] [INFO] [1717217562.982516150] [zed.zed_node]: * Debug Object Detection: FALSE
[component_container-3] [INFO] [1717217562.982640216] [zed.zed_node]: * Debug Body Tracking: FALSE
[component_container-3] [INFO] [1717217562.982684313] [zed.zed_node]: * Debug Streaming: FALSE
[component_container-3] [INFO] [1717217562.982713497] [zed.zed_node]: * Debug ROI: FALSE
[component_container-3] [INFO] [1717217562.982754617] [zed.zed_node]: * Debug Advanced: FALSE
[component_container-3] [INFO] [1717217562.983068285] [zed.zed_node]: *** GENERAL parameters ***
[component_container-3] [INFO] [1717217562.983239040] [zed.zed_node]: * Camera model: zed2 - ZED 2
[component_container-3] [INFO] [1717217562.983294976] [zed.zed_node]: * Camera name: zed
[component_container-3] [INFO] [1717217562.983335361] [zed.zed_node]: * Camera SN: 0
[component_container-3] [INFO] [1717217562.984058762] [zed.zed_node]: * Camera timeout [sec]: 5
[component_container-3] [INFO] [1717217562.984194732] [zed.zed_node]: * Camera reconnection temptatives: 5
[component_container-3] [INFO] [1717217562.984402927] [zed.zed_node]: * Camera framerate: 15
[component_container-3] [INFO] [1717217562.984548432] [zed.zed_node]: * GPU ID: -1
[component_container-3] [WARN] [1717217562.984820756] [zed.zed_node]: Not valid 'general.pub_resolution' value: 'MEDIUM'. Using default setting instead.
[component_container-3] [INFO] [1717217562.984872501] [zed.zed_node]: * Publishing resolution: NATIVE
[component_container-3] [INFO] [1717217562.984933301] [zed.zed_node]: * OpenCV custom calibration:
[component_container-3] [INFO] [1717217562.984970550] [zed.zed_node]: * Camera self calibration: TRUE
[component_container-3] [INFO] [1717217562.985000470] [zed.zed_node]: * Camera flip: FALSE
[component_container-3] [INFO] [1717217562.985082807] [zed.zed_node]: * [DYN] Publish framerate [Hz]: 15
[component_container-3] [INFO] [1717217562.985107928] [zed.zed_node]: *** VIDEO parameters ***
[component_container-3] [INFO] [1717217562.985146584] [zed.zed_node]: * [DYN] Brightness: 4
[component_container-3] [INFO] [1717217562.985174744] [zed.zed_node]: * [DYN] Contrast: 4
[component_container-3] [INFO] [1717217562.985211033] [zed.zed_node]: * [DYN] Hue: 0
[component_container-3] [INFO] [1717217562.985352859] [zed.zed_node]: * [DYN] Saturation: 4
[component_container-3] [INFO] [1717217562.985410139] [zed.zed_node]: * [DYN] Sharpness: 4
[component_container-3] [INFO] [1717217562.985444956] [zed.zed_node]: * [DYN] Gamma: 8
[component_container-3] [INFO] [1717217562.985472508] [zed.zed_node]: * [DYN] Auto Exposure/Gain: TRUE
[component_container-3] [INFO] [1717217562.985503549] [zed.zed_node]: * [DYN] Exposure: 80
[component_container-3] [INFO] [1717217562.985528317] [zed.zed_node]: * [DYN] Gain: 80
[component_container-3] [INFO] [1717217562.985550237] [zed.zed_node]: * [DYN] Auto White Balance: TRUE
[component_container-3] [INFO] [1717217562.985573118] [zed.zed_node]: * [DYN] White Balance Temperature: 42
[component_container-3] [INFO] [1717217562.985594302] [zed.zed_node]: *** DEPTH parameters ***
[component_container-3] [INFO] [1717217562.985647358] [zed.zed_node]: * Depth mode: ULTRA [3]
[component_container-3] [INFO] [1717217562.986110948] [zed.zed_node]: * Min depth [m]: 0.2
[component_container-3] [INFO] [1717217562.986305031] [zed.zed_node]: * Max depth [m]: 10
[component_container-3] [INFO] [1717217562.986344935] [zed.zed_node]: * Depth Stabilization: 1
[component_container-3] [INFO] [1717217562.986372968] [zed.zed_node]: * OpenNI mode (16bit point cloud): FALSE
[component_container-3] [INFO] [1717217562.986410792] [zed.zed_node]: * [DYN] Point cloud rate [Hz]: 15
[component_container-3] [INFO] [1717217562.986440073] [zed.zed_node]: * [DYN] Depth Confidence: 50
[component_container-3] [INFO] [1717217562.986715692] [zed.zed_node]: * [DYN] Depth Texture Confidence: 100
[component_container-3] [INFO] [1717217562.986818509] [zed.zed_node]: * [DYN] Remove saturated areas: TRUE
[component_container-3] [INFO] [1717217562.986861614] [zed.zed_node]: *** GNSS FUSION parameters ***
[component_container-3] [INFO] [1717217562.987074673] [zed.zed_node]: * GNSS fusion enabled: FALSE
[component_container-3] [INFO] [1717217562.987124145] [zed.zed_node]: *** POSITIONAL TRACKING parameters ***
[component_container-3] [INFO] [1717217562.987358260] [zed.zed_node]: * Positional tracking enabled: FALSE
[component_container-3] [WARN] [1717217562.987538391] [zed.zed_node]: 'pos_tracking.pos_tracking_mode' not valid (''). Using default value.
[component_container-3] [INFO] [1717217562.987587063] [zed.zed_node]: * Positional tracking mode: POSITIONAL TRACKING MODE GEN_2
[component_container-3] [INFO] [1717217562.987865531] [zed.zed_node]: * Map frame id: map
[component_container-3] [INFO] [1717217562.988074014] [zed.zed_node]: * Odometry frame id: odom
[component_container-3] [INFO] [1717217562.988300672] [zed.zed_node]: * Broadcast Odometry TF: FALSE
[component_container-3] [INFO] [1717217562.988335649] [zed.zed_node]: * Broadcast Pose TF: FALSE
[component_container-3] [INFO] [1717217562.988553956] [zed.zed_node]: * [DYN] Depth minimum range: 0
[component_container-3] [INFO] [1717217562.988951433] [zed.zed_node]: * [DYN] TF timestamp offset: 0.05
[component_container-3] [INFO] [1717217562.989314925] [zed.zed_node]: * [DYN] Path publishing rate: 2
[component_container-3] [INFO] [1717217562.989455599] [zed.zed_node]: * Path history lenght: -1
[component_container-3] [INFO] [1717217562.989634642] [zed.zed_node]: * Initial pose: [0,0,0,0,0,0,]
[component_container-3] [INFO] [1717217562.989930869] [zed.zed_node]: * Area Memory: TRUE
[component_container-3] [INFO] [1717217562.990195033] [zed.zed_node]: * Area Memory DB:
[component_container-3] [INFO] [1717217562.990424060] [zed.zed_node]: * Camera is static: FALSE
[component_container-3] [INFO] [1717217562.990603742] [zed.zed_node]: * Gravity as origin [not for ZED]: FALSE
[component_container-3] [INFO] [1717217562.990775520] [zed.zed_node]: * IMU Fusion [not for ZED]: TRUE
[component_container-3] [INFO] [1717217562.991004323] [zed.zed_node]: * Floor Alignment: FALSE
[component_container-3] [INFO] [1717217562.991266278] [zed.zed_node]: * Reset Odometry with Loop Closure: TRUE
[component_container-3] [INFO] [1717217562.991419816] [zed.zed_node]: * 2D mode: FALSE
[component_container-3] [INFO] [1717217562.991589579] [zed.zed_node]: *** Region of Interest parameters ***
[component_container-3] [INFO] [1717217562.991668460] [zed.zed_node]: * Automatic ROI generation: FALSE
[component_container-3] [INFO] [1717217562.991895822] [zed.zed_node]: * Manual ROI polygon: []
[component_container-3] [INFO] [1717217562.991932463] [zed.zed_node]: *** SENSORS STACK parameters ***
[component_container-3] [INFO] [1717217562.992060465] [zed.zed_node]: * Broadcast IMU TF [not for ZED]: FALSE
[component_container-3] [INFO] [1717217562.992268979] [zed.zed_node]: * Sensors Camera Sync: FALSE
[component_container-3] [INFO] [1717217562.992500342] [zed.zed_node]: * Sensors publishing rate: 400 Hz
[component_container-3] [INFO] [1717217562.992541271] [zed.zed_node]: *** Spatial Mapping parameters ***
[component_container-3] [INFO] [1717217562.992695129] [zed.zed_node]: * Spatial Mapping Enabled: FALSE
[component_container-3] [INFO] [1717217562.992898683] [zed.zed_node]: * Spatial Mapping resolution [m]: 0.05
[component_container-3] [INFO] [1717217562.993125118] [zed.zed_node]: * 3D Max Mapping range [m]: 10
[component_container-3] [INFO] [1717217562.993347809] [zed.zed_node]: * Map publishing rate [Hz]: 1
[component_container-3] [INFO] [1717217562.993608900] [zed.zed_node]: * Clicked point topic:
[component_container-3] [INFO] [1717217562.993828263] [zed.zed_node]: * Plane Det. Max Dist. Thresh.: 0.15
[component_container-3] [INFO] [1717217562.994023018] [zed.zed_node]: * Plane Det. Normals Sim. Thresh.: 15
[component_container-3] [INFO] [1717217562.994064234] [zed.zed_node]: *** Object Det. parameters ***
[component_container-3] [INFO] [1717217562.994206732] [zed.zed_node]: * Object Det. enabled: FALSE
[component_container-3] [WARN] [1717217562.994429359] [zed.zed_node]: The value of the parameter 'object_detection.model' is not valid: ''. Using the default value.
[component_container-3] [INFO] [1717217562.994533552] [zed.zed_node]: * Object Det. model: MULTI CLASS BOX FAST
[component_container-3] [INFO] [1717217562.994616785] [zed.zed_node]: * Object Det. allow reduced precision: FALSE
[component_container-3] [INFO] [1717217562.994893973] [zed.zed_node]: * Object Det. maximum range [m]: 15
[component_container-3] [INFO] [1717217562.995169144] [zed.zed_node]: * Object Det. min. confidence: 40
[component_container-3] [INFO] [1717217562.995583902] [zed.zed_node]: * Object Det. prediction timeout [sec]: 0.5
[component_container-3] [INFO] [1717217562.995937378] [zed.zed_node]: * Object Det. tracking: TRUE
[component_container-3] [INFO] [1717217562.996259302] [zed.zed_node]: * Object Filtering mode: 1 - NMS 3D
[component_container-3] [INFO] [1717217562.996639819] [zed.zed_node]: * MultiClassBox people: TRUE
[component_container-3] [INFO] [1717217562.996957903] [zed.zed_node]: * MultiClassBox vehicles: TRUE
[component_container-3] [INFO] [1717217562.997393237] [zed.zed_node]: * MultiClassBox bags: TRUE
[component_container-3] [INFO] [1717217562.997741625] [zed.zed_node]: * MultiClassBox animals: TRUE
[component_container-3] [INFO] [1717217562.997994749] [zed.zed_node]: * MultiClassBox electronics: TRUE
[component_container-3] [INFO] [1717217562.998205599] [zed.zed_node]: * MultiClassBox fruits and vegetables: TRUE
[component_container-3] [INFO] [1717217562.998697542] [zed.zed_node]: * MultiClassBox sport-related objects: TRUE
[component_container-3] [INFO] [1717217562.998831751] [zed.zed_node]: *** Body Track. parameters ***
[component_container-3] [INFO] [1717217562.999126955] [zed.zed_node]: * Body Track. enabled: FALSE
[component_container-3] [INFO] [1717217562.999588209] [zed.zed_node]: * Body Track. model: HUMAN BODY FAST
[component_container-3] [INFO] [1717217562.999948598] [zed.zed_node]: * Body Track. format: BODY_38
[component_container-3] [INFO] [1717217563.000220409] [zed.zed_node]: * Body Track. allow reduced precision: FALSE
[component_container-3] [INFO] [1717217563.000317146] [zed.zed_node]: * Body Track. maximum range [m]: 15
[component_container-3] [INFO] [1717217563.000366395] [zed.zed_node]: * Body Track. KP selection: FULL
[component_container-3] [INFO] [1717217563.000421852] [zed.zed_node]: * Body fitting: TRUE
[component_container-3] [INFO] [1717217563.000461148] [zed.zed_node]: * Body joints tracking: TRUE
[component_container-3] [INFO] [1717217563.000500541] [zed.zed_node]: * Body Track. prediction timeout [sec]: 0.5
[component_container-3] [INFO] [1717217563.000552957] [zed.zed_node]: * Body Track. confidence thresh.: 50
[component_container-3] [INFO] [1717217563.000596798] [zed.zed_node]: * Body Track. min. KP thresh.: 10
[component_container-3] [INFO] [1717217563.000622878] [zed.zed_node]: *** Streaming Server parameters ***
[component_container-3] [INFO] [1717217563.000658239] [zed.zed_node]: * Streaming Server enabled: FALSE
[component_container-3] [INFO] [1717217563.000691647] [zed.zed_node]: * Stream codec: H264
[component_container-3] [INFO] [1717217563.001199878] [zed.zed_node]: * Stream port:30000
[component_container-3] [INFO] [1717217563.001255238] [zed.zed_node]: * Stream bitrate: 12500
[component_container-3] [INFO] [1717217563.001323335] [zed.zed_node]: * Stream GOP size: -1
[component_container-3] [INFO] [1717217563.001372552] [zed.zed_node]: * Stream Chunk size: 16084
[component_container-3] [INFO] [1717217563.001420680] [zed.zed_node]: * Adaptive bitrate: FALSE
[component_container-3] [INFO] [1717217563.001460361] [zed.zed_node]: * Target frame rate:0
[component_container-3] [INFO] [1717217563.001484585] [zed.zed_node]: *** Advanced parameters ***
[component_container-3] [INFO] [1717217563.001522122] [zed.zed_node]: * Thread sched. policy:
[component_container-3] [INFO] [1717217563.001657131] [zed.zed_node]: *** SERVICES ***
[component_container-3] [INFO] [1717217563.003811175] [zed.zed_node]: * '/zed/zed_node/reset_odometry'
[component_container-3] [INFO] [1717217563.004589905] [zed.zed_node]: * '/zed/zed_node/reset_pos_tracking'
[component_container-3] [INFO] [1717217563.007058257] [zed.zed_node]: * '/zed/zed_node/set_pose'
[component_container-3] [INFO] [1717217563.008160703] [zed.zed_node]: * '/zed/zed_node/enable_obj_det'
[component_container-3] [INFO] [1717217563.010170744] [zed.zed_node]: * '/zed/zed_node/enable_body_trk'
[component_container-3] [INFO] [1717217563.011067396] [zed.zed_node]: * '/zed/zed_node/enable_mapping'
[component_container-3] [INFO] [1717217563.011878638] [zed.zed_node]: * '/zed/zed_node/enable_streaming'
[component_container-3] [INFO] [1717217563.013146110] [zed.zed_node]: * '/zed/zed_node/start_svo_rec'
[component_container-3] [INFO] [1717217563.014127211] [zed.zed_node]: * '/zed/zed_node/stop_svo_rec'
[component_container-3] [INFO] [1717217563.015416668] [zed.zed_node]: * '/zed/zed_node/set_roi'
[component_container-3] [INFO] [1717217563.016236358] [zed.zed_node]: * '/zed/zed_node/reset_roi'
[component_container-3] [INFO] [1717217563.016299207] [zed.zed_node]: ***** STARTING CAMERA *****
[component_container-3] [INFO] [1717217563.016338919] [zed.zed_node]: ZED SDK Version: 4.1.2 - Build 88406_f27a1ebf
[component_container-3] [INFO] [1717217563.022106321] [zed.zed_node]: *** CAMERA OPENING ***
[rviz2-1] [INFO] [1717217563.635655104] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-1] [INFO] [1717217563.635983300] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[component_container-3] [2024-06-01 04:52:43 UTC][ZED][INFO] Logging level INFO
[rviz2-1] [INFO] [1717217563.699981367] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-1] Parsing robot urdf xml string.
[component_container-3] [WARN] [1717217564.458242819] [zed.zed_node]: Error opening camera: CAMERA NOT DETECTED
[component_container-3] [INFO] [1717217564.458411781] [zed.zed_node]: Please verify the camera connection
[component_container-3] [2024-06-01 04:52:44 UTC][ZED][WARNING] CAMERA NOT DETECTED in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
[rviz2-1] [INFO] [1717217564.749367474] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-1] [INFO] [1717217564.869002478] [rviz2]: Stereo is NOT SUPPORTED
[component_container-3] [2024-06-01 04:52:49 UTC][ZED][INFO] Logging level INFO
[component_container-3] [2024-06-01 04:52:50 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [2024-06-01 04:52:50 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [WARN] [1717217571.033531429] [zed.zed_node]: Error opening camera: CAMERA NOT DETECTED
[component_container-3] [INFO] [1717217571.033728935] [zed.zed_node]: Please verify the camera connection
[component_container-3] [2024-06-01 04:52:51 UTC][ZED][WARNING] CAMERA NOT DETECTED in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
[component_container-3] [2024-06-01 04:52:56 UTC][ZED][INFO] Logging level INFO
[component_container-3] [2024-06-01 04:52:56 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [2024-06-01 04:52:56 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [WARN] [1717217577.329142560] [zed.zed_node]: Error opening camera: CAMERA NOT DETECTED
[component_container-3] [INFO] [1717217577.329267650] [zed.zed_node]: Please verify the camera connection
[component_container-3] [2024-06-01 04:52:57 UTC][ZED][WARNING] CAMERA NOT DETECTED in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
[component_container-3] [2024-06-01 04:53:02 UTC][ZED][INFO] Logging level INFO
[component_container-3] [2024-06-01 04:53:02 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [2024-06-01 04:53:02 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [WARN] [1717217583.617415956] [zed.zed_node]: Error opening camera: CAMERA NOT DETECTED
[component_container-3] [INFO] [1717217583.617562133] [zed.zed_node]: Please verify the camera connection
[component_container-3] [2024-06-01 04:53:03 UTC][ZED][WARNING] CAMERA NOT DETECTED in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
[component_container-3] [2024-06-01 04:53:09 UTC][ZED][INFO] Logging level INFO
[component_container-3] [2024-06-01 04:53:09 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [2024-06-01 04:53:09 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[component_container-3] [WARN] [1717217589.913251293] [zed.zed_node]: Error opening camera: CAMERA NOT DETECTED
[component_container-3] [INFO] [1717217589.913390111] [zed.zed_node]: Please verify the camera connection
[component_container-3] [ERROR] [1717217589.913417727] [zed.zed_node]: Camera detection timeout
[component_container-3] [2024-06-01 04:53:09 UTC][ZED][WARNING] CAMERA NOT DETECTED in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
[ERROR] [component_container-3]: process has died [pid 171288, exit code 1, cmd '/opt/ros/foxy/lib/rclcpp_components/component_container --ros-args -r __node:=zed_depth_to_laserscan -r __ns:=/zed'].
When running ZED_Explorer and ZED_Depth_Viewer in /usr/local/zed/tools, the camera works normally.
Is it correct to run both ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zed2
and ros2 launch zed_depth_to_laserscan zed_depth_to_laserscan.launch.py camera_model:=zed2?
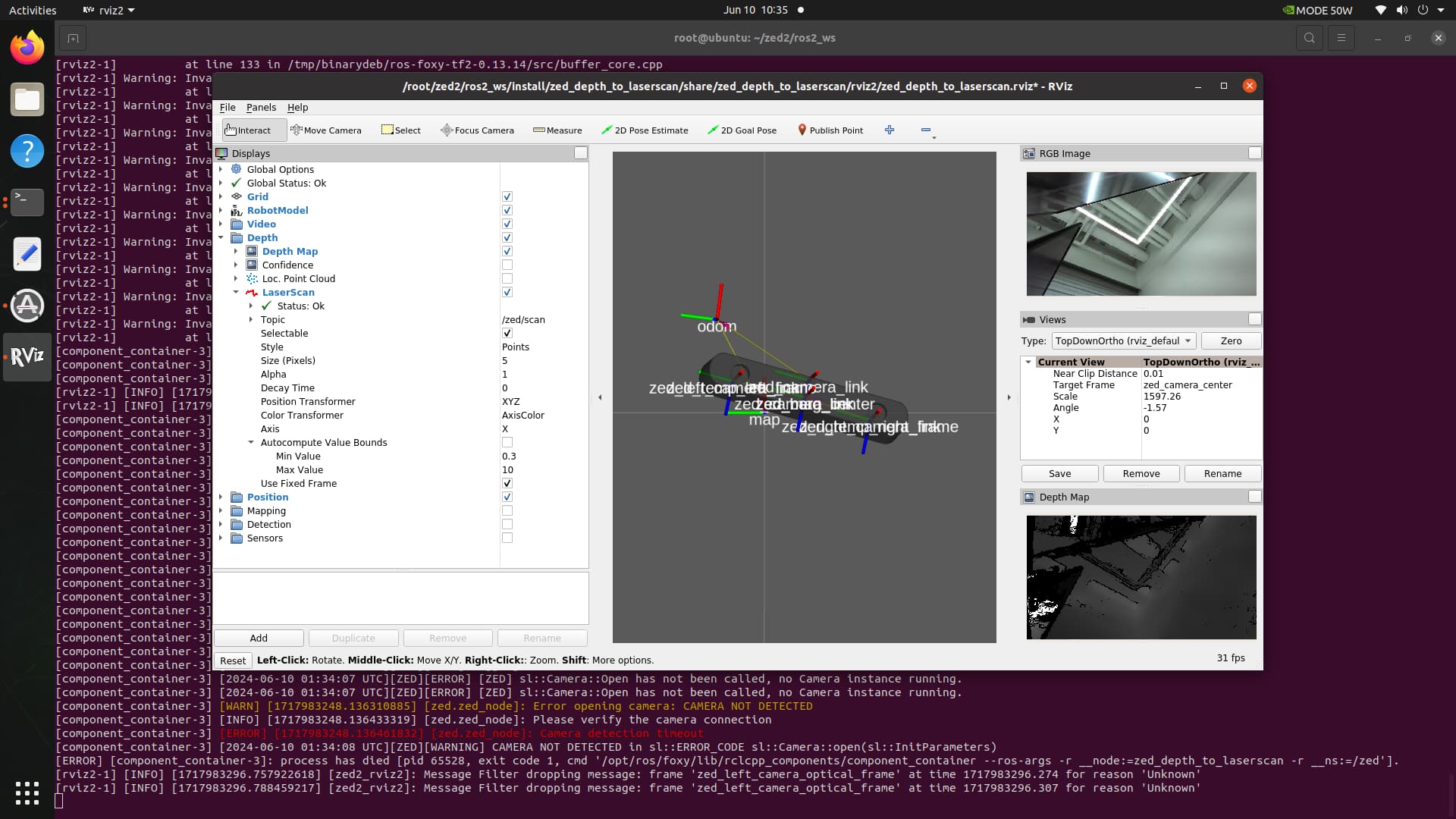
When executing zed_depth_to_laserscan, the RGB Image and Depth Map windows in rviz display images. However, they are not converted to scan data.
The launch command ros2 launch zed_depth_to_laserscan zed_depth_to_laserscan.launch.py camera_model:=zed2 already starts a ZED Node by using composition.
Please read the README file with attention for details.
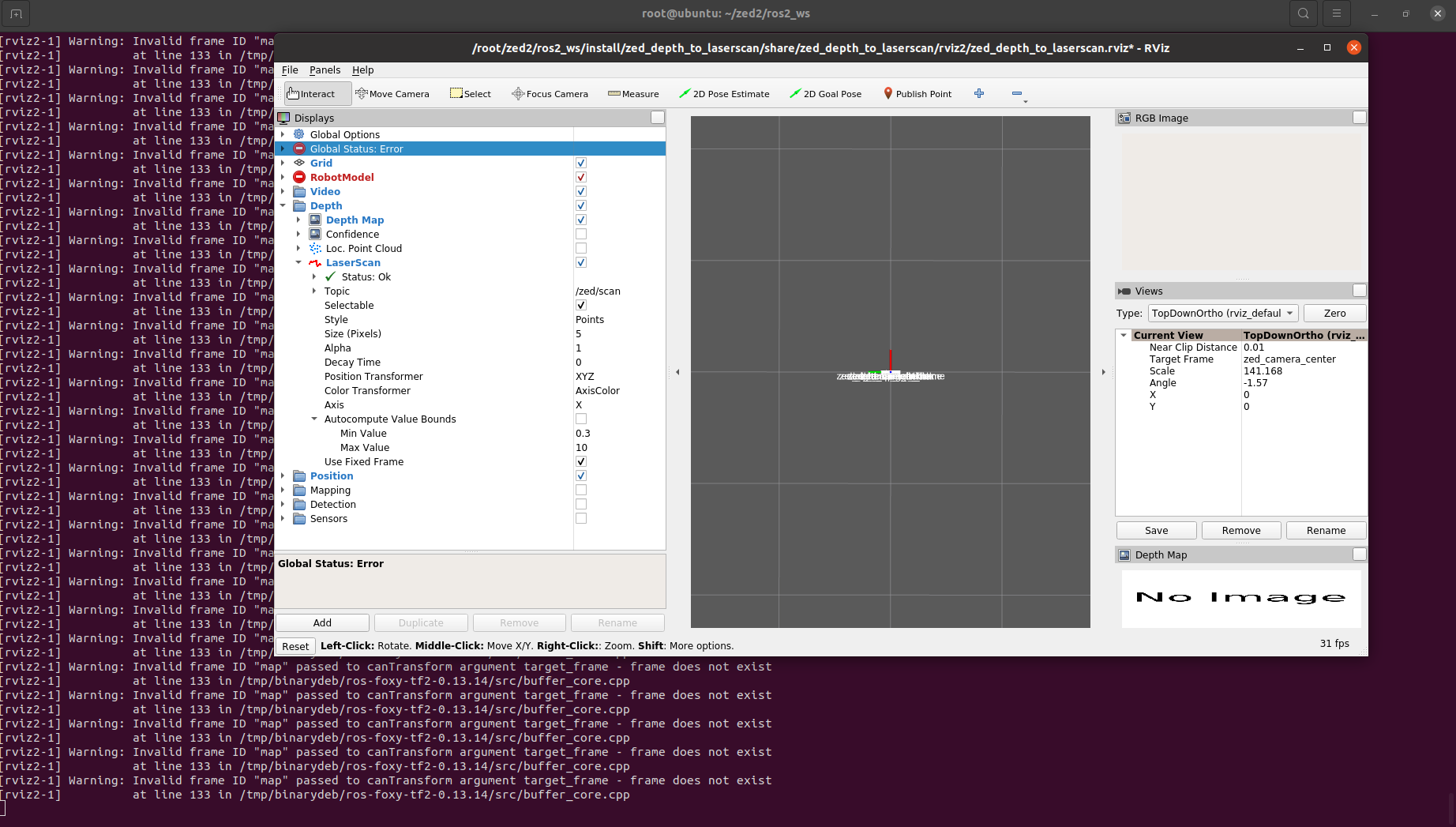
If you only run ros2 launch zed_depth_to_laserscan zed_depth_to_laserscan.launch.py camera_model:=zed2, RGB Image and Depth map do not appear in rviz.
And
[rviz2-1] Warning: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.14/src/buffer_core.cpp
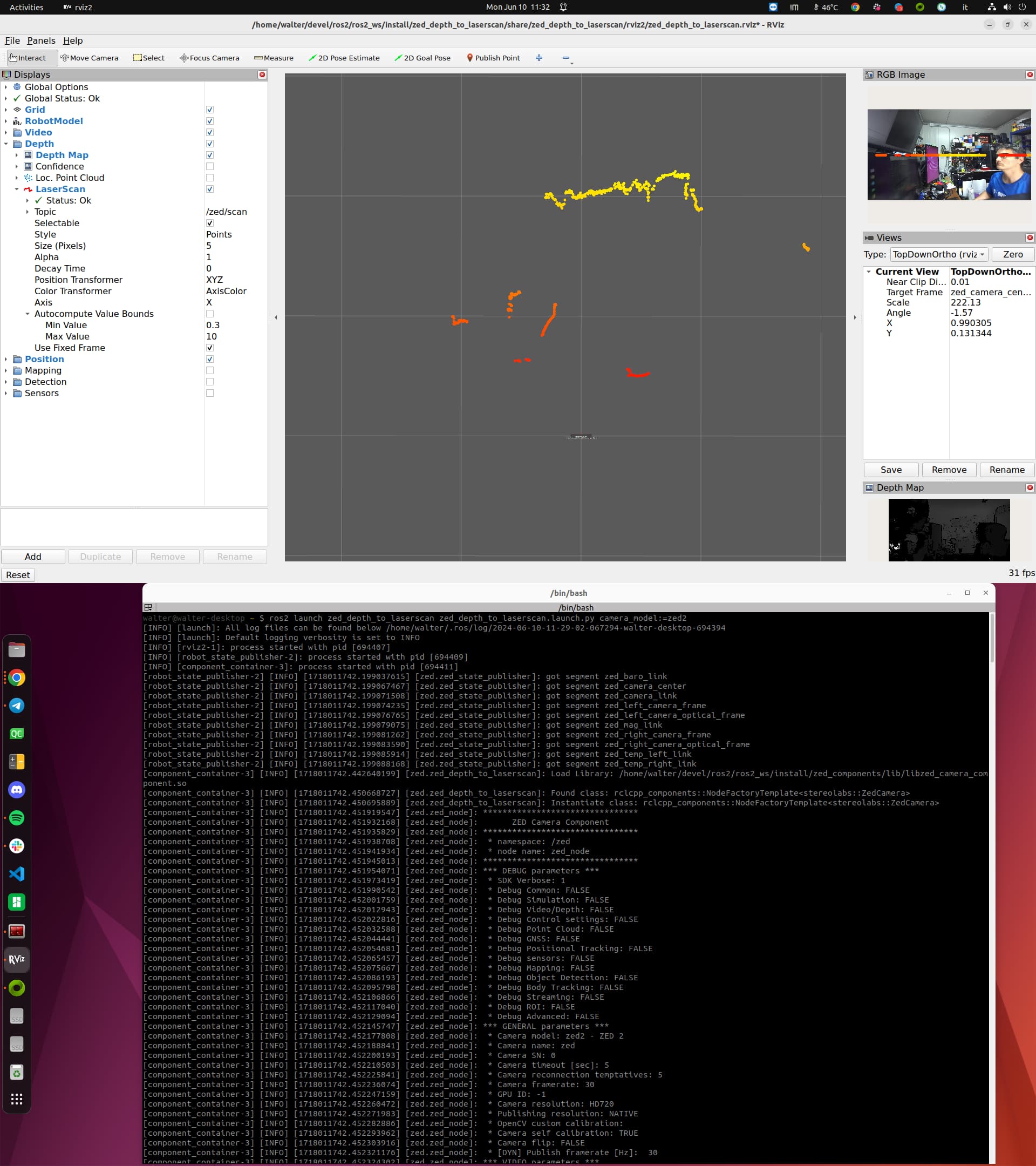
The problem seems to be in the zed-ros2-wrapper package.
Can you please update it?
Please also delete the build and install folders and build your workspace again to be sure to update all the packages.
Current orin operating system: Ubuntu 20.04
docker image : stereolabs/zed:4.1-tools-devel-l4t-r35.4
Can I just create a container using the stereolabs/zed:4.1-tools-devel-l4t-r35.4 image and immediately install humble?
Or should I also install 22.04 in the docker container?
You are on a Jetson, so the Docker image must be based on the same Jetpack version running on the host.
The Dockerfile in the zed-ros2-wrapper repository uses ROS 2 Humble installed from the source.
After execution, image creation is complete. ros2_ws/src/zed-ros2-wrapper/docker$ ./jetson_build_dockerfile_from_sdk_and_l4T_version.sh l4t-r35.4.1 zedsdk4.1.2
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
zed_ros2_l4t_image latest f8e9457135d5 5 hours ago 12.1GB
dustynv/ros humble-ros-base-l4t-r35.4.1 441bbd3796f4 10 months ago 10.8GB
root@ubuntu:~/docker_humble/ros2_ws# rosdep install --from-paths src --ignore-src -r -y
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
zed_rgb_convert: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_topic_benchmark: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_tutorial_depth: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_topic_benchmark_interfaces: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_multi_camera: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_tutorial_pos_tracking: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_depth_to_laserscan: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_aruco_localization: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_topic_benchmark_component: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_robot_integration: No definition of [xacro] for OS version [focal]
rviz_plugin_zed_od: No definition of [ament_cmake_clang_format] for OS version [focal]
zed_display_rviz2: No definition of [ament_cmake_clang_format] for OS version [focal]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully
Is it because orin is 20.04 that I can’t use that docker image?