I’m using the zed2i camera on Jetson AGX Xavier. I realised that the CPU usage of the ROS wrapper is quite high despite having a relatively low resolution (720P) and framerate (10). I have also disabled mapping, object detection, pose tracking etc. I only want to open the camera view.
With just one node subscribing the image topic, the CPU usage of the zed wrapper can go up to 100+ % in total. May I know if there are any other ways I can reduce the CPU usage? Or is this normal? It doesn’t really make sense because a normal USB camera with even higher resolution or framerate settings consumes only about 10-20% CPU.
Hi @joewong00
most of the CPU load is taken by ROS to copy data to be published.
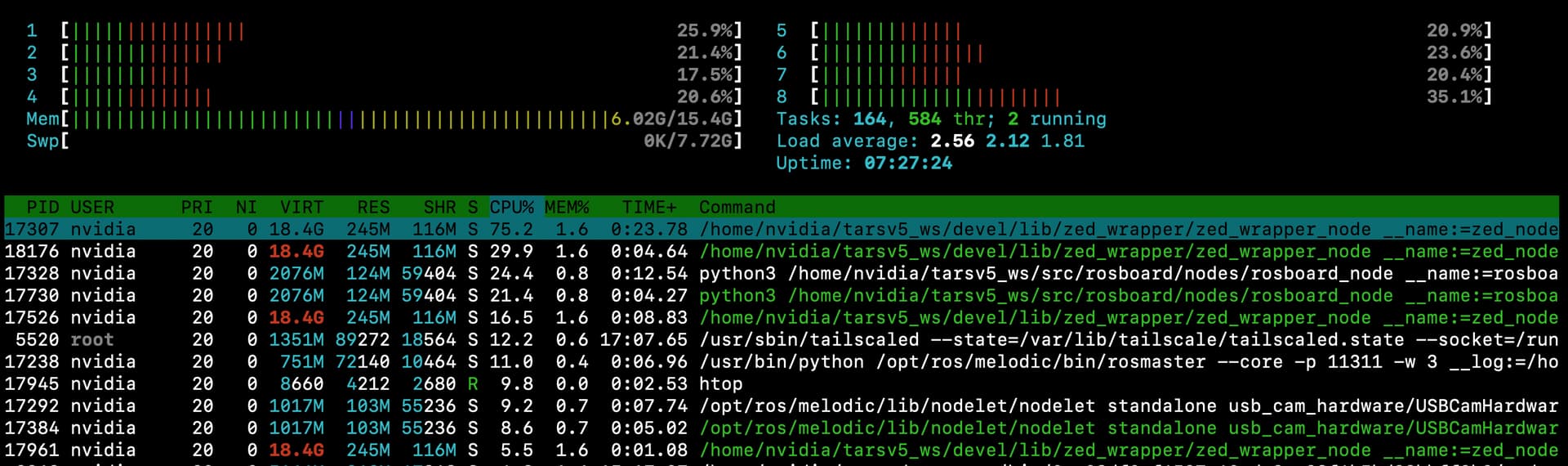
Please also note that no one of the CPU cores is over 35%
You can try to set the depth mode to NONE to disable all the depth processings if you do not neet them.
I understand that none of the cores is having high usage, but the overall usage as seen from the processes below, is more than 100% from zed wrapper alone. I believe the processes are spread out between all CPU cores. I need the CPU memory for performing other more intensive calculations, I didn’t expect that zed wrapper alone is occupying so much.
Thanks for the suggestions anyway, I will try that.