Hi
We are develop an embebbed service on a Xavier NX. Where are using last ZED SDK version and Jetpack 4.5. As soon as we use this camera resources usage go up, we only need to get a depth map and a RGB image. CPU usage near 75-100% on all CPU and GPU near 75-100%. We need to run tensorrt and other services on same plataform but with this resource usage its practically impossible to run other things in the same machine. We use in the past other cameras, but IMHO is a huge cost to create this depth image.
This is the way this camera and SDK works?
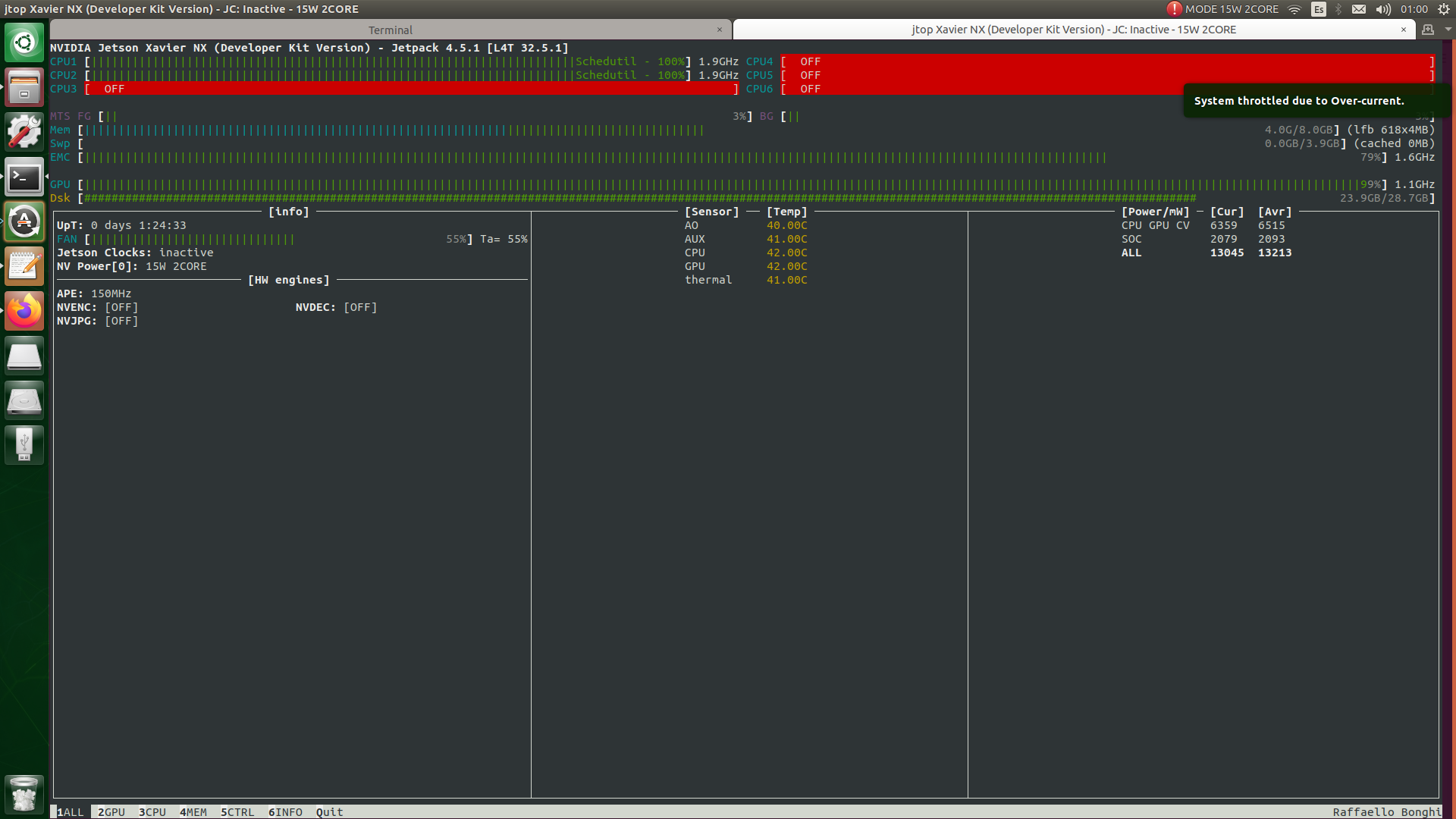
This image was obtained running jtop while execute tutorial 3 - depth sensing with 10K iterations on other terminal with ultra definition and without fill. Depth distance 1m to 10m. No pointcloud only Depth.
Thanks