Hi Team,
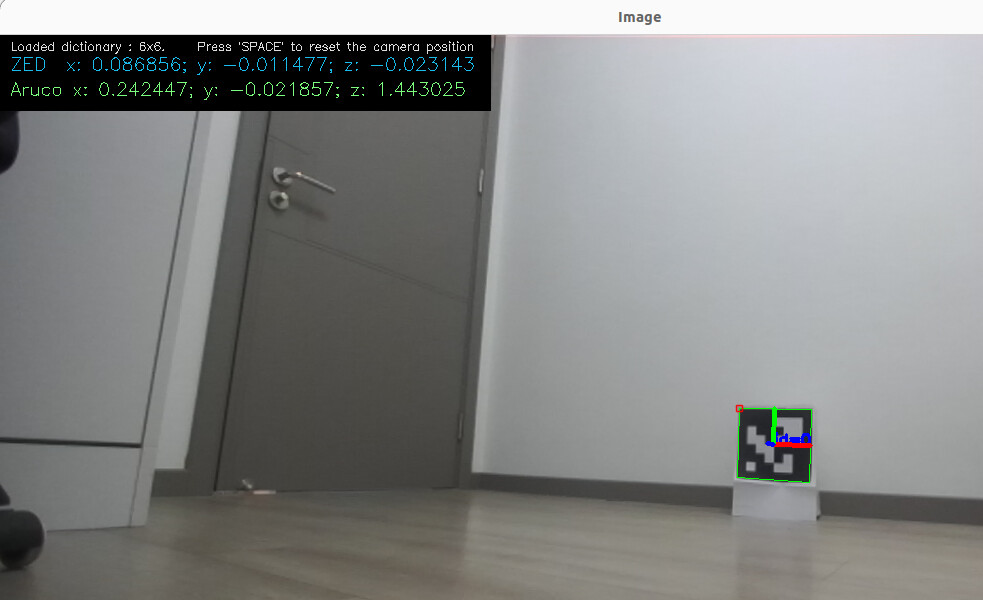
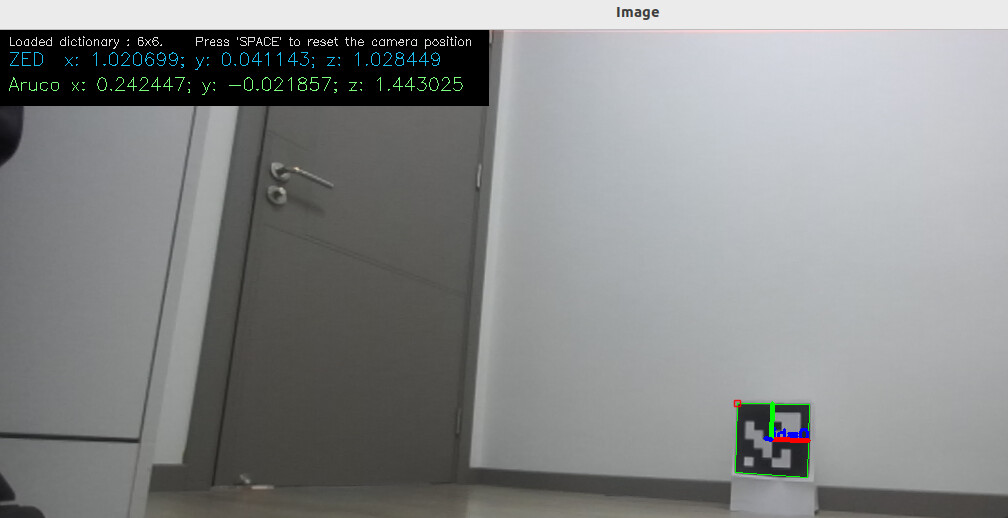
We are trying the mono project code of ZED-ARUCO in ZED SDK sample, expect we can reset ZED pose base on the ARUCO tag pose. Below is the screenshot i use to explain my concern. the first one is captured immediately after the program is launched, in which we can see the initial pose of zed camera and ARUCO tag. The second one is taken after i press ‘Space‘ key multiple times. As you can see the zed pose is reset, however its x, y, z value still very different with ARUCO tag pose, could you help explain why the zed camera pose is different with tag pose after reset? and do we have any way to avoid the zed pose deviation of zed.resetPositionalTracking(pose) method?
Thank you!
Hi @phenixyu
What is the example that you are using?
Please post the link.