I’m trying to attach my ZED Mini camera as a branch in another TF tree, but I cannot find a clear description of where zed_camera_link is actually located on the physical camera.
I found a forum post saying that the frame is located at the base, at the center of the 1/4" camera mount. However, the ZED Mini does not have that mount, but just two M4 screws at the base, so I’m not sure whether that information applies here.
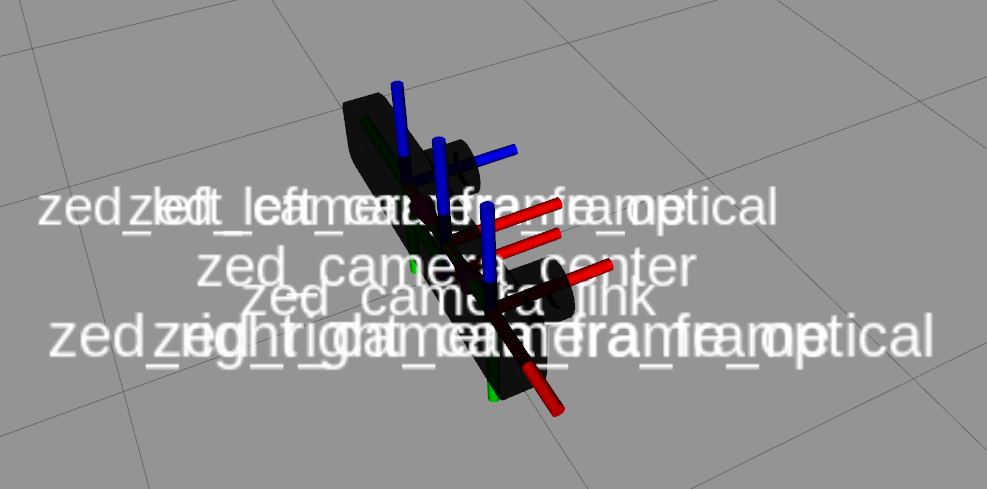
Does anyone know exactly where zed_camera_link is defined on the ZED Mini?
I would like to check one specific geometric point about the ZED Mini frame definitions.
On the ZED Mini, the two lenses are not physically symmetrically mirrored with respect to the geometric center of the bottom/base camera structure. Visually, they seem shifted by about 9 mm toward the right optical-frame side.
Given that, am I correct in assuming that the physical optical axis of each lens and the corresponding optical TF should still be collinear?
In other words, even if the TF origin is not located on the front glass surface, I would still expect:
the optical-frame origin to lie on the physical central axis of the lens
and the optical-frame forward axis to be aligned with that physical lens axis
Is that correct, or is there some additional internal transformation or modeling offset in the ZED Mini frame definitions that makes this assumption wrong?
I am asking because I am debugging ArUco pose-estimation geometry and want to make sure I am reasoning from the correct physical interpretation of the camera TFs.