We have a StereoLabs Mini Carrier Board and are trying to connect a serial device (gimbal) over UART (PINOUT GPIO #09, #10 with ground #08). We are currently unable to get any communication with the serial device.
To isolate the problem, we did a physical loopback test (connecting pin #09 to #10) and could not receive any messages we sent (using pyserial). Tried ttyTHS1, ttyTHS2, and ttyAMA0 (there is no ttyTHS0). Repeated same test with an oscilloscope; same results. On boot, with the oscilloscope attached, we see data output when the boot text scrolls across the screen before the login screen. We have confirmed the same behavior with two Orin NX modules (we only have 1 carrier board).
The user is part of both tty and dialout groups as per this.
What is the configuration to use pins #09 and #10?
Hi @penguin
The UART of the Mini carrier board is connected to the pins of the UART2 of the NVIDIA Jetson module.
UART2 is configured by default as a debug port, and we are working to provide a guide to reconfigure it as a general-purpose UART if possible.
Do you have an approximate timeframe on the guide? We have a deadline approaching and may need to pursue a different solution in the interim. Is there a less ‘invasive’ method to setup a serial device with the carrier board?
Unfortunately, it seems that the debug port cannot be easily reconfigured as a general-purpose port.
We are still investigating to find a way to do that.
Then, although I like your carrier design, I still highly suggest you extend the connectivities of the ZED Jetson carrier board in the next generation to make it more competitive. At least +1 USB 3.2 port, + more GPIOs, + UART1. Maybe also a mini PCIe.
I know in the Jetson Orin Nano Dev kit, this is how you enable the UART port(Pin 8 and 10 on the Expansion Header) to unlock the UART to be used. By default it is used for Debug.
Could the same be applied on the mini carrier board or is it connected to other UART?
Yes, I have used these on the Jetson Orin Nano Dev Kit and unlocked the UART. Unfortunately, I do not possess a Zed Mini Carrier board or Zed Mini Box to test on them. However, I am keen to know if the commands work as I am planning on buying the mini carrier board.
I tested this idea, trying to use the debugging serial port /dev/ttyTCU0 to connect to Mavros.
Results: It did not work as this is a combined port. It is currently outputting ASCII text (Linux kernel logs). MAVROS is looking at that text, seeing random bytes that accidentally match a MAVLink header start-byte ($0xFD$ or $0xFE$), and then interpreting the following text characters as System and Component IDs.
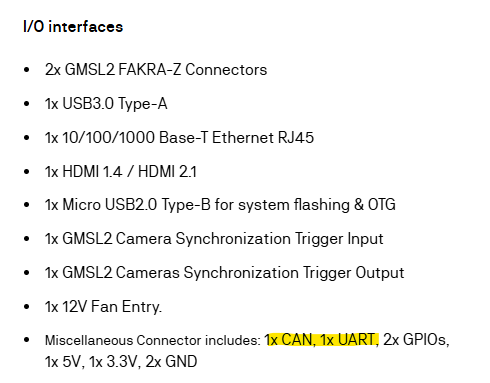
Can you explain more about this HW upgrade? because looks like for now i am stuck with 10 units where the specs say have both CAN and UART, then the manual says there is no CAN transiver and now the forum says no UART. For the intended drone usage, there are not a lot of ways to communicate with the autopilot.
what am I expected to do?
I think you guys need to update the store page for this device these are just wrong
tried a lot with claude to see if i find a solution since all your guys comments here a very vague, this is the result attached, TLDR no way to fix in software.
trying to share the result i either get a not allowed to attach or can have more than 2 links even thou there are no links, i’ll email the result.