I’m using a ZED X One setup with six GMSL2 cameras together with a ZED Link Quad.
According to the link below, I understand that the ZED Link Quad is essentially a combination of two ZED Link Duos. When using more than four cameras, the two FAKRA ports (each supporting up to four cameras) can have different timestamps, so to synchronize them you connect pins 13–16 on J17 to each other to align the synchronization between the two groups.
Is my understanding correct?
If so, assuming I use all six cameras, I would like to additionally synchronize an Ouster OS1 LiDAR using a hard-trigger (hardware trigger) method. How should I proceed?
Is it impossible because the two pins are already used for synchronization?
This is my first time dealing with synchronization, and although I searched, it was hard to find relevant information.
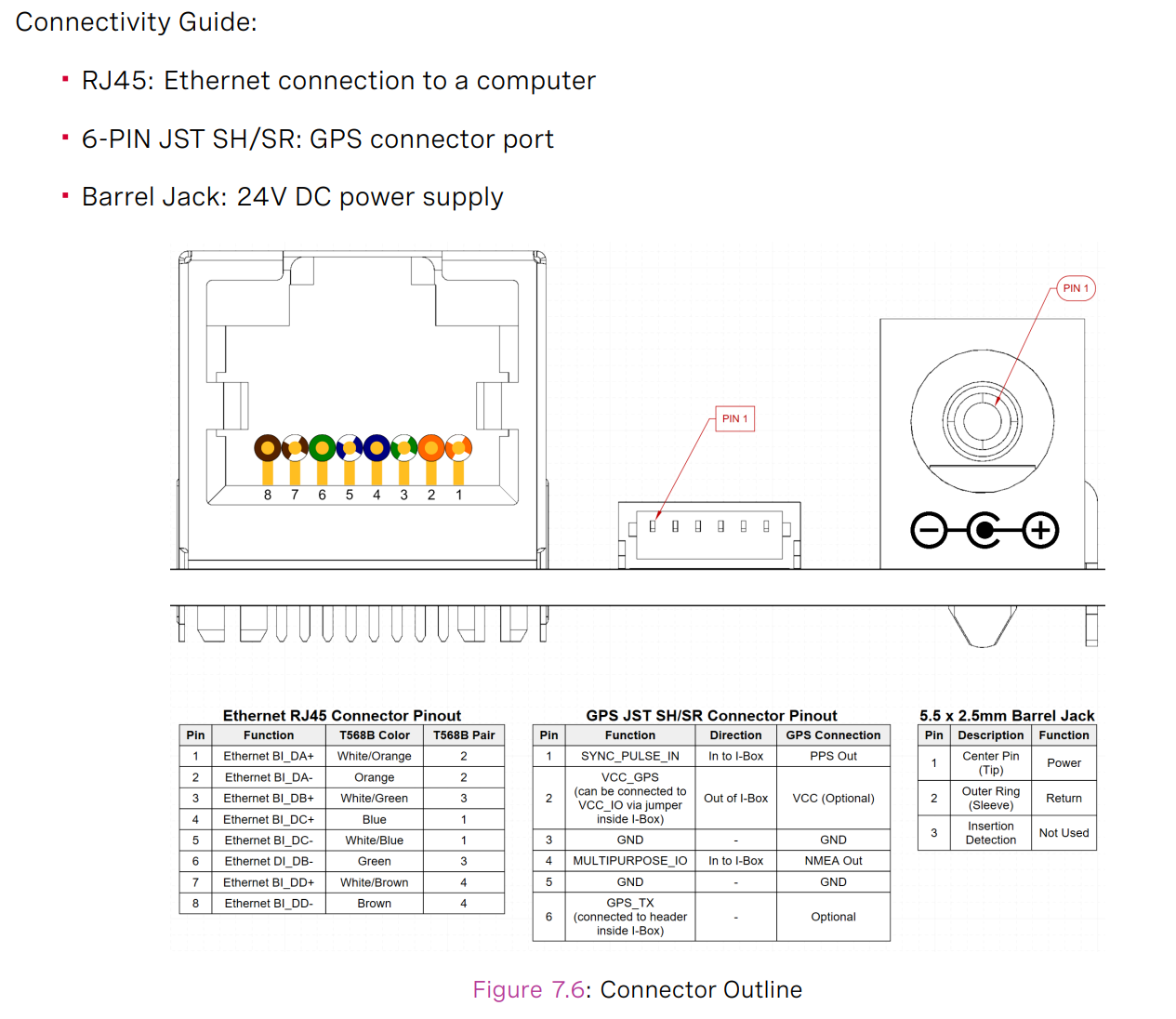
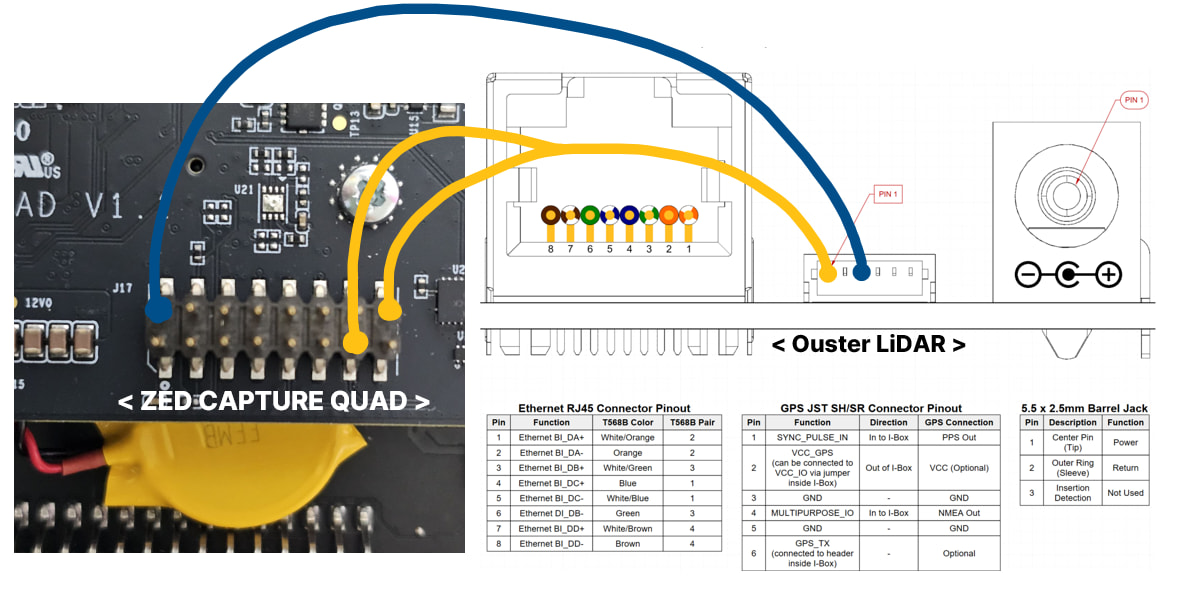
Below are the references provided by ZED that I consulted, and the image below is the connector photo related to hard sync on the Ouster LiDAR.
You can use the same onboard sync signal as an output to trigger the capture on the Ouster.
You can split the cable to send the signal to the slave GMSL2 deserializer and to the external simultaneously.
Remember that in this case, you must also connect the GND signal to the external receiver to have the same signal voltage reference.
This is a feature that we’ve just released, so it’s expected that not much information is available.
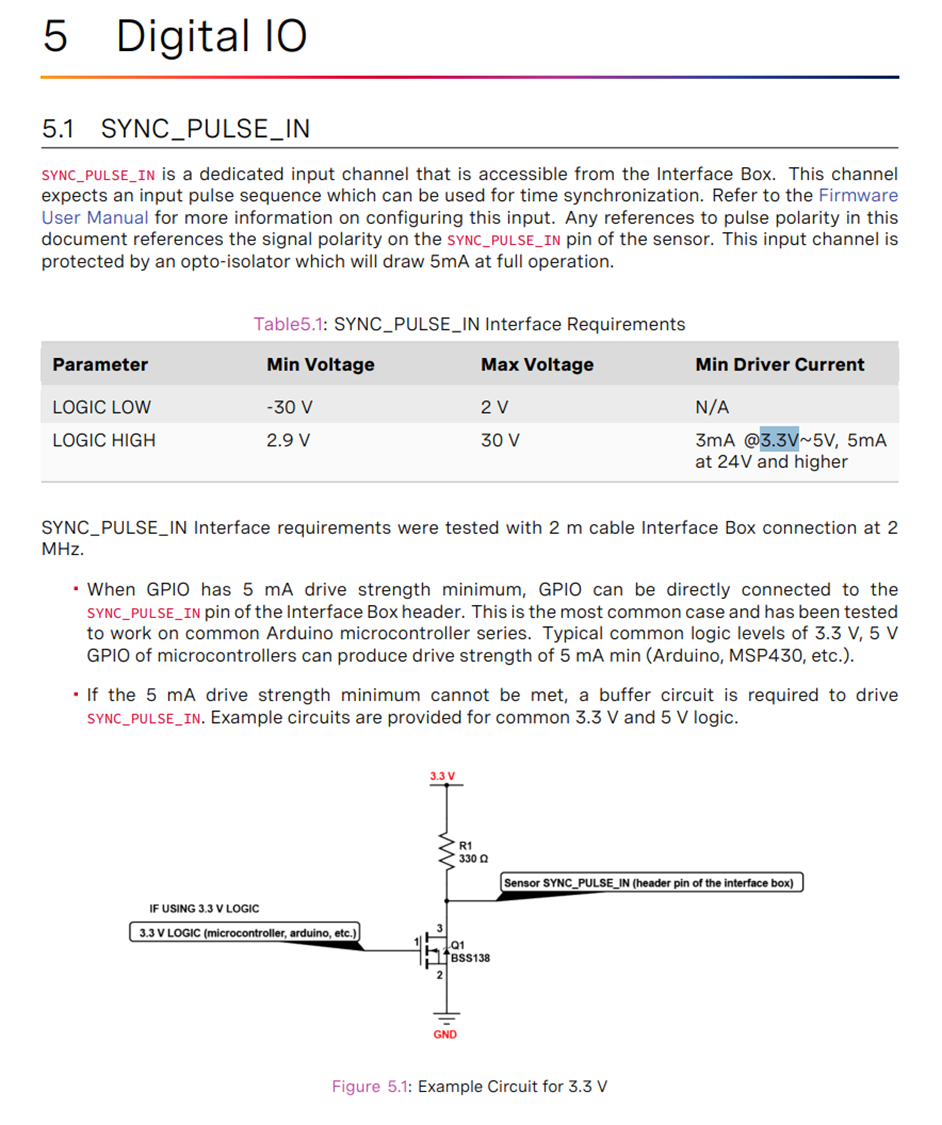
Please note that if the SINC_PULSE_IN of the Ouster requires a different voltage than the provided 3.3V, you need a voltage converter circuit too.
Finally, you must also use PTP to synchronize the clock of the Jetson and of the Ouster.
I’m sharing a document I found regarding sync_pulse_in on the Ouster LiDAR hardware.
In my perspective, everything looks fine, but do you see any potential issues related to the voltage you mentioned? I’m not very familiar with this area, so even though I checked it myself, I wanted to ask again to confirm from an expert’s perspective.