Hi,
I am trying to use a simulated Zed X in Isaac Sim
I am using Zed SDK inside a docker container. The container is running Zed SDK 4.1 with Cuda 11.8. and Ubuntu 22.04
I ran the ZED Diagnostics and every check passed except for the USB camera one.

I can successfully view the RGB feed from both the left and right cameras in the Zed Explorer.

But I cannot see anything when I run the Zed Depth Viewer. I get following error in terminal
[2024-09-27 12:29:35 UTC][ZED][INFO] Logging level INFO
[Streaming] No backward compatibility required.
[Streaming] Warning: Corrupted frame chunk received (recv: 196 / expect 4112) from ip : 192.168.0.106 at ts 1727440175139(ms)
[2024-09-27 12:29:35 UTC][ZED][INFO] [Init] Depth mode: ULTRA
[2024-09-27 12:29:35 UTC][ZED][INFO] [Init] Serial Number: S/N 40976320
[2024-09-27 12:29:35 UTC][ZED][WARNING] Simulated ZED camera used.
[2024-09-27 12:29:35 UTC][ZED][WARNING] [Init] Invalid calibration file. On Linux, call export LC_ALL="C" and restart your application.
[2024-09-27 12:29:35 UTC][ZED][WARNING] Self Calibration Disabled.
[2024-09-27 12:29:35 UTC][ZED][WARNING] [Init] Requested depth_minimum_distance: 0.3METER is too close, clamped to 0.4METER.
in bool ImageHandler::initialize(sl::Mat&) : Err [999]: unknown error.
in bool ImageHandler::initialize(sl::Mat&) : Err [400]: invalid resource handle.
in bool ImageHandler::initialize(sl::Mat&) : Err [400]: invalid resource handle.
in bool ImageHandler::initialize(sl::Mat&) : Err [400]: invalid resource handle.
in bool ImageHandler::initialize(sl::Mat&) : Err [999]: unknown error.
in bool ImageHandler::initialize(sl::Mat&) : Err [400]: invalid resource handle.
in bool ImageHandler::initialize(sl::Mat&) : Err [400]: invalid resource handle.
in bool ImageHandler::initialize(sl::Mat&) : Err [400]: invalid resource handle.
I get the following screen in the Depth Viewer
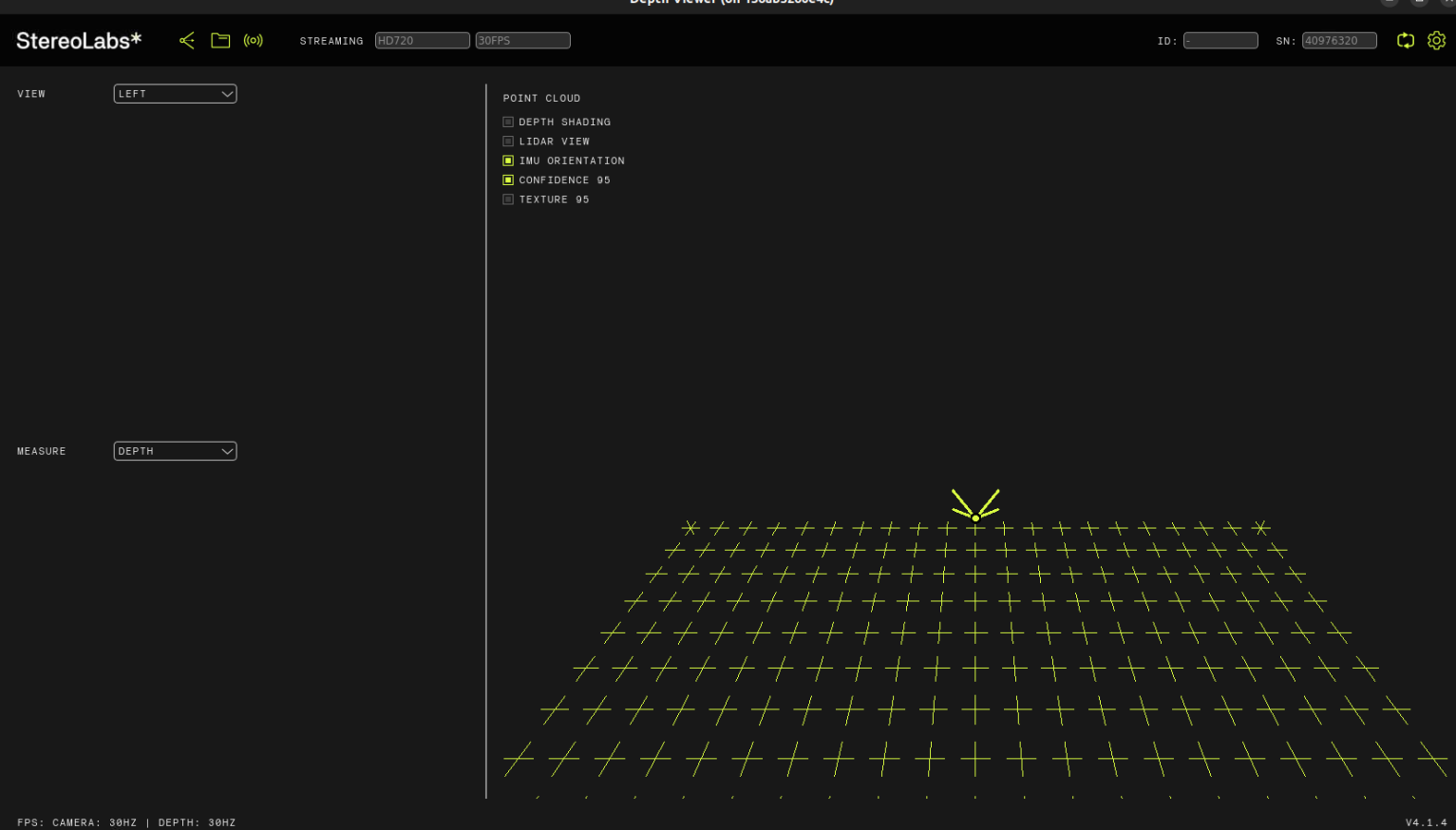
Please help me out
Thank you