I’m considering using a pair of ZED X One 4K cameras mounted with a custom baseline of 1–2 meters for a stereo setup.
The goal is to detect and estimate the distance of a boat in open sea, approximately 2 m × 3 m × 6 m (H×W×D), at a range of about 100 meters.
My main questions are:
Would such a stereo pair (with proper calibration and synchronization) be able to reliably detect an object of that size up to 100 m range?
Assuming good lighting and stable mounting, what kind of depth accuracy or error deviation could be expected at that distance?
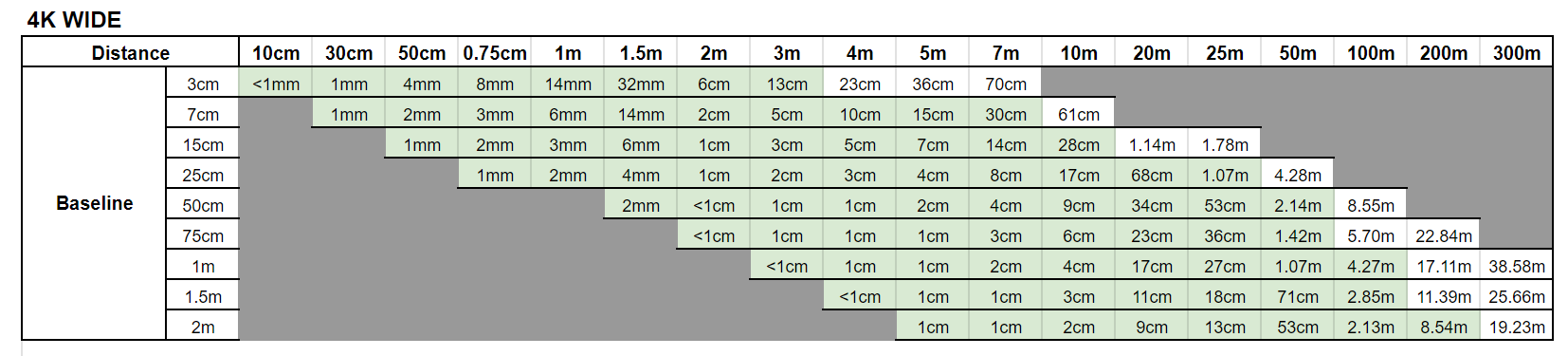
Any practical insights, experience, or theoretical guidance (e.g., based on the ZED X One 4k sensor specs, focal length, or disparity accuracy) would be highly appreciated!
I am trying to compute the max length of my rig with ZED X One 4K wide, Using the given formula: max_depth = (B/2) * F/sens_w * res_W
i put the parameters and get:
B=2m
F=3mm →0.003m
*sens_w=*7.7 mm for the 4K HDR CMOS →0.0077m
*res_W=*3840
max_depth = (2/2) x 0.003/0.0077 x 3840 => 1x 0.389x3840=1,496
Im getting hard to understand the result. maybe something in my calculation is not right.
please correct me and let me know what is wrong here.
Ok, and do you know to tell me if measure the distance is from what part in the object?
for example, my object is a boat, so we taking the distance from the closest part in the boat to the cameras? or to a specific point ?