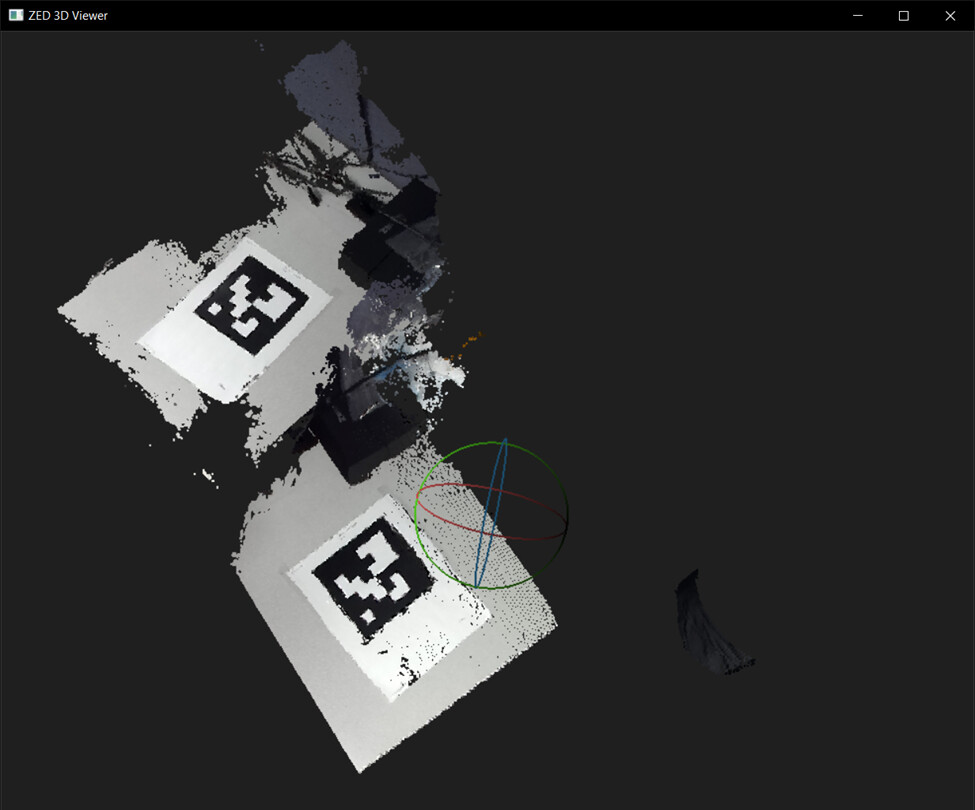
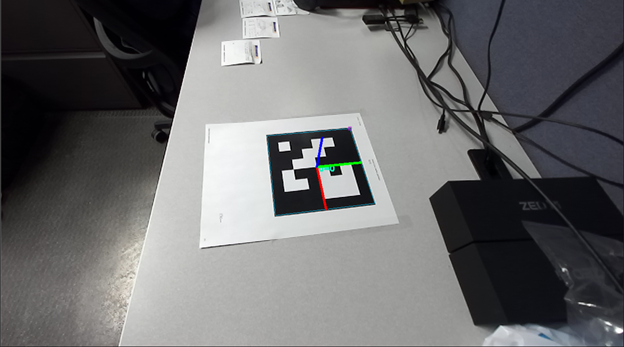
From the link above, I used cmake, added a depth min and max, built in release. The program asks for 6x6 aruco marker that is 150mm which I have printed out perfectly too and made it as flat as possible on table. The result is attached. One of the camera is positioned 90 degrees off and is a little higher than the other a little bit.
What can I do to make this better?
And what would be the best way to integrate this calibration into my own projects or save the camera position to put into my own projects?