Hi,
This is because get_python_api.py returns the latest python module, which is now 4.0.8. The compatibility was not there between 4.0.7 and 4.0.6 because the API changed within the same minor version. We will avoid that in future patches, it was because of the early access. Sorry again.
If you still want to use 4.0.6 and the python module, you can build it yourself from the repo GitHub - stereolabs/zed-python-api: Python API for the ZED SDK. It’s actually quite easy.
It’s very suprising that you found difference between NEURAL version 4.0.6 and 4.0.7 since it did not change. Is it still the case with 4.0.8 ? Can you send a SVO so that we can investigate ?
The issue now is in scenes that would’ve previously had points almost everywhere, we get large patches of completely empty space when using low confidence_thresholds
Indeed, the confidence ranges was retuned - however if you modify the confidence, you can get the same quality as you had before. It’s just that low confidences are now really low, whereas they were still quite high before.
The issue is it’s really hard to know what the mapping from old confidence values to new confidence values is. The changelog and docs provided no guidance on this issue. If you can provide more guidance now it’d be very helpful
I have tried many confidence values. None consistently perform in a similar manner. Do you have the python whl for 4.0.6? I would like to manually install it. The depth model 4.0.7+ is not viable.
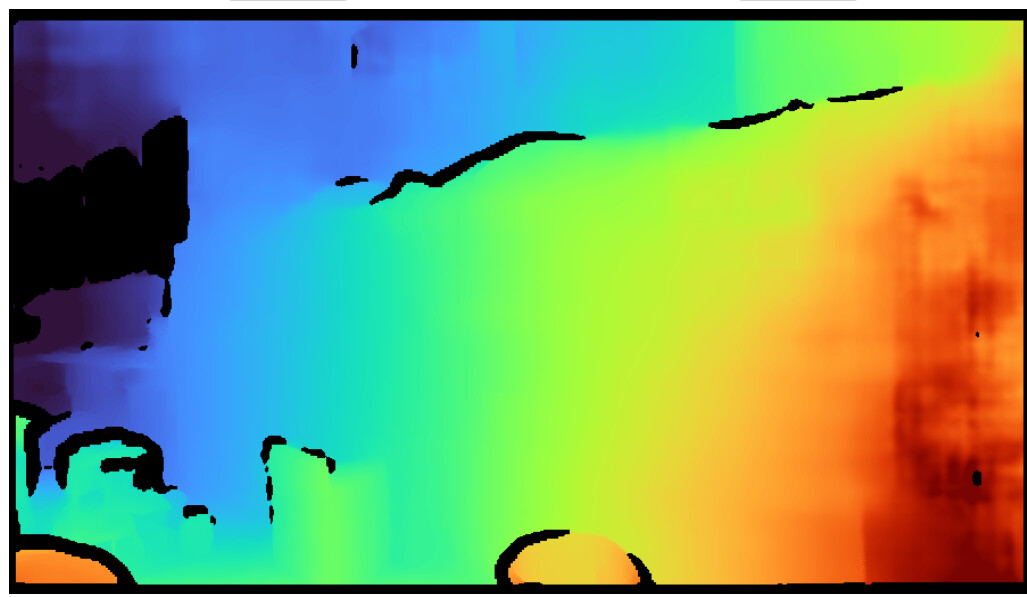
This two images are taken from 4.0.5 and 4.0.8. The one with more black is 4.0.6 at 0%, the other is 4.0.8 at 1%. I guess the confidence is still too high for you ? If you can send a SVO file, it can really help us understand the issue better. I thought that you actually had less points than before, but in my tests I get more.
What you can try is to remove the NEURAL model from /usr/local/zed/resources, to force a reoptimizations. You’ll be sure you have a fresh installation.
In the meantime, here is the python wrapper for 4.0.6. pyzed.zip (929.6 KB)
Do you have the 4.0.6 wheel file? Alternatively, how do I convert the zip you sent to a wheel.
I was able to build the 4.0.8 egg from source, but didn’t see how to produce a wheel file from that. The building also failed for me for sdk versions <4.0.8 on any of the 5 most recent commits of the python-sdk repo.
I observed a similar change in the number of points between 4.0.6 and 4.0.7. In almost every case there were more points in 4.0.7+ with a confidence threshold of 1% compared to <4.0.7 with a confidence of 0. However, in <5% of cases the 4.0.7+ model with confidences ranging between (1 and 5) would catastrophically return no points for about 1/4 of the entire scene. These scenes were all within the min/max depth runtime parameters and similar to the scenes we had successfully operated in with <4.0.7.
I’d like to send you an SVO, but don’t have any available and struggle to reproduce this issue whenever SVO recording is an option. Is there a way to use the SDK normally/live and also record SVOs?
Also if you have an email/slack/discord we could use to communicate I can share more details than I am comfortable doing on this forum.
You can just replace the files I sent you in the repo from github (latest vesion). Then do what is in the readme.
Alternatively, send me you platform and python version and I will build you it. I guess, Python3.10, Ubuntu20 ? If that’s the case, here it is: pyzed-4.0-cp310-cp310-linux_x86_64.whl (622.9 KB)
Hi, I tried again to build the wheels for python 3.11, but still ran into tons of issues. Could you compile a ubuntu 20, python 3.11 wheel for me? It would be incredibly helpful. Thank you
Also is there a docker container you’d recommend for compiling things?
I spent some more time on this. I was able to build the wheel for 3.11 ubuntu 20 with 4.0.8, but not with the files you sent for 4.0.6. To get it to work for 4.0.8 I
Built off stereolabs/zed:4.0-devel-cuda11.8-ubuntu20.04 docker image with a python3.11-dev virtual environment
Installed the 4.0.6 SDK
Swapped in the files you sent
Installed all required python packages
Ran python setup.py bdist_wheel
When running setup.py I get a bunch of errors like
------------------------------------------------------------
pyzed/sl.pyx:10670:89: 'c_REFERENCE_FRAME' is not a type identifier
Error compiling Cython file:
------------------------------------------------------------
...
# \param reference_frame: Defines the reference from which you want the pose to be expressed. Default : \ref REFERENCE_FRAME "REFERENCE_FRAME.WORLD".
# \param uuid: If set to a sender serial number (different from 0), this will retrieve position projected on the requested camera if \ref position_type is equal to \ref POSITION_TYPE "POSITION_TYPE.FUSION" or raw sender position if \ref position_type is equal to \ref POSITION_TYPE "POSITION_TYPE.RAW".
# \param position_type: Select if the position should the fused position re-projected in the camera with uuid or if the position should be the raw position (without fusion) of camera with uui.
# \return POSITIONAL_TRACKING_STATE is the current state of the tracking process.
def get_position(self, camera_pose : Pose, reference_frame : REFERENCE_FRAME = REFERENCE_FRAME.WORLD, uuid: CameraIdentifier = CameraIdentifier(), position_type : POSITION_TYPE = POSITION_TYPE.FUSION):
return POSITIONAL_TRACKING_STATE(<int>self.fusion.getPosition(camera_pose.pose, <c_REFERENCE_FRAME>(<int>reference_frame.value), uuid.cameraIdentifier, <c_POSITION_TYPE>(<int>position_type.value)))
^
------------------------------------------------------------
pyzed/sl.pyx:10670:161: 'c_POSITION_TYPE' is not a type identifier
Error compiling Cython file:
------------------------------------------------------------
...
# \return sl.Transform is the calibration found between VIO and GNSS during calibration process.
##
def get_geo_tracking_calibration(self) -> Transform:
# cdef c_Transform tmp
tf_out = Transform()
tmp = <c_Transform>(self.fusion.getGeoTrackingCalibration())
^
------------------------------------------------------------
pyzed/sl.pyx:10731:15: 'c_Transform' is not a type identifier
Error compiling Cython file:
------------------------------------------------------------
...
# \return sl.Transform is the calibration found between VIO and GNSS during calibration process.
##
def get_geo_tracking_calibration(self) -> Transform:
# cdef c_Transform tmp
tf_out = Transform()
tmp = <c_Transform>(self.fusion.getGeoTrackingCalibration())
^
------------------------------------------------------------
pyzed/sl.pyx:10731:14: Casting temporary Python object to non-numeric non-Python type
Traceback (most recent call last):
File "/root/zed-python-api/src/setup.py", line 194, in <module>
extList = cythonize(extension, compiler_directives=cython_directives)
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/root/311-env/lib/python3.11/site-packages/Cython/Build/Dependencies.py", line 1154, in cythonize
cythonize_one(*args)
File "/root/311-env/lib/python3.11/site-packages/Cython/Build/Dependencies.py", line 1321, in cythonize_one
raise CompileError(None, pyx_file)
Cython.Compiler.Errors.CompileError: pyzed/sl.pyx