Hello guys,
I am working with a Unitree Go2 quadruped robot for indoor and outdoor environment monitoring. I’m using the ZED 2i + ZED Box Mini for visual SLAM and pose tracking.
I’ve modified the positional tracking sample to:
-
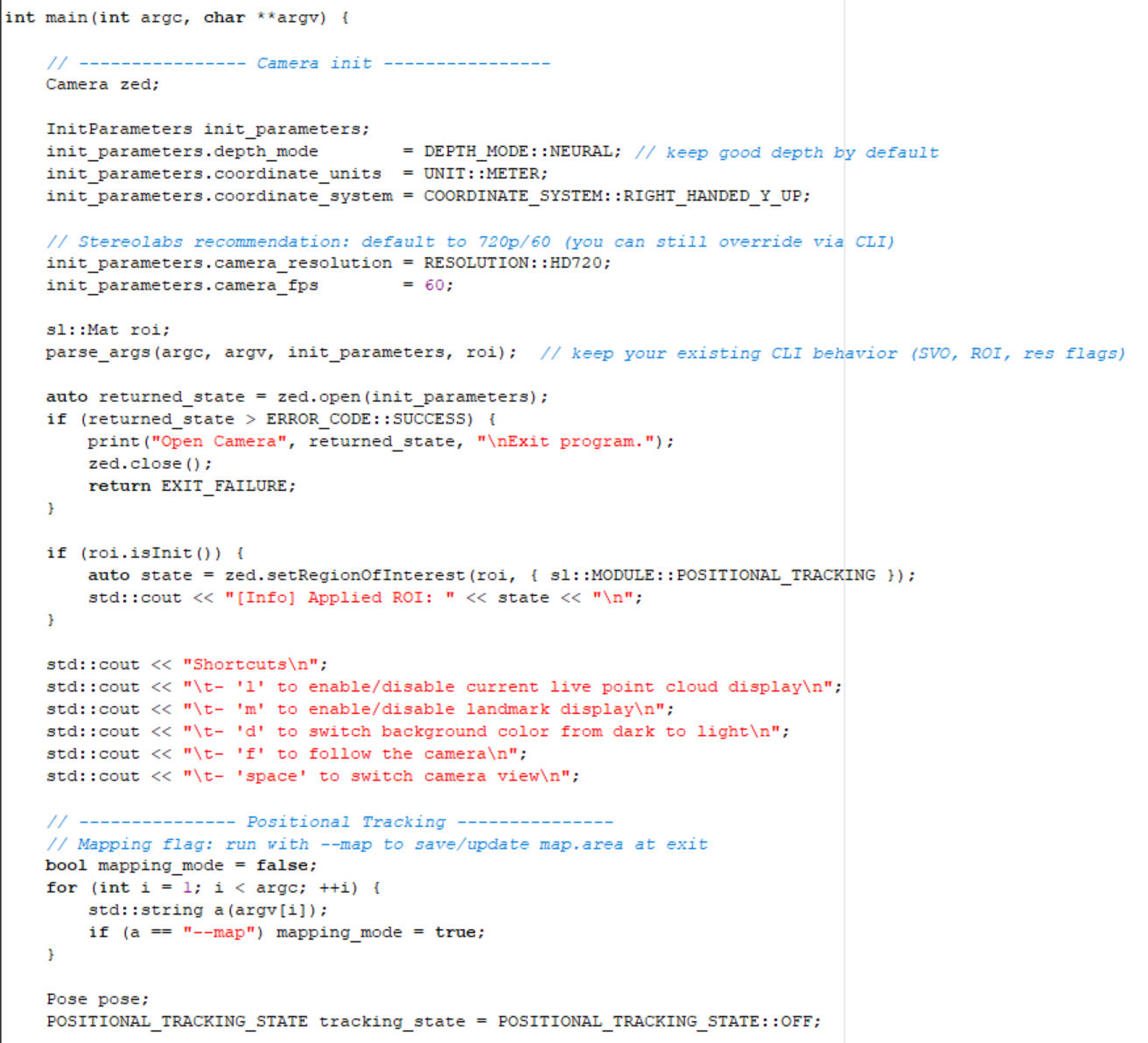
set the camera to HD720 @ 60 fps,
-
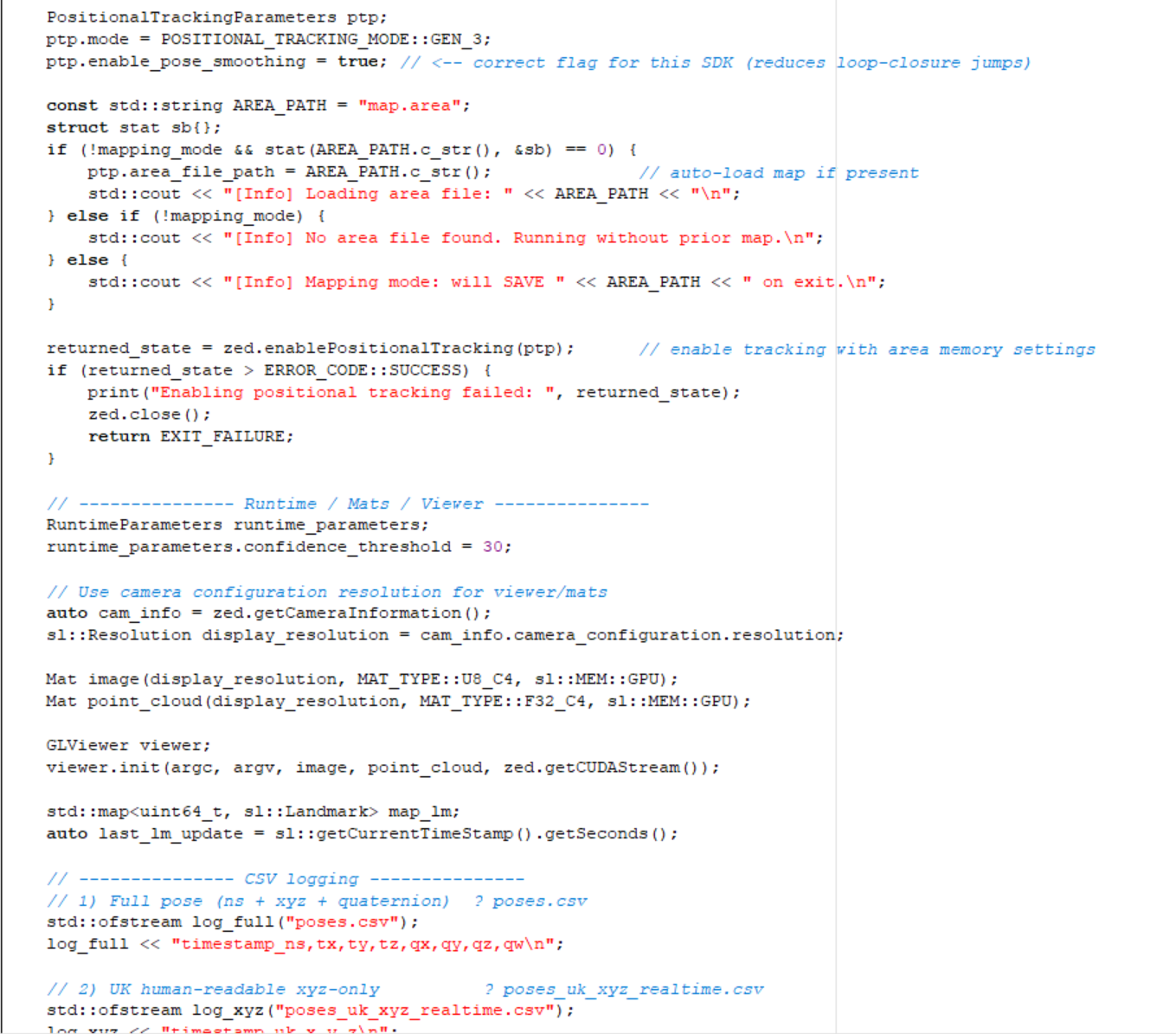
enable pose smoothing,
-
enable Area Memory (save/load
map.area), -
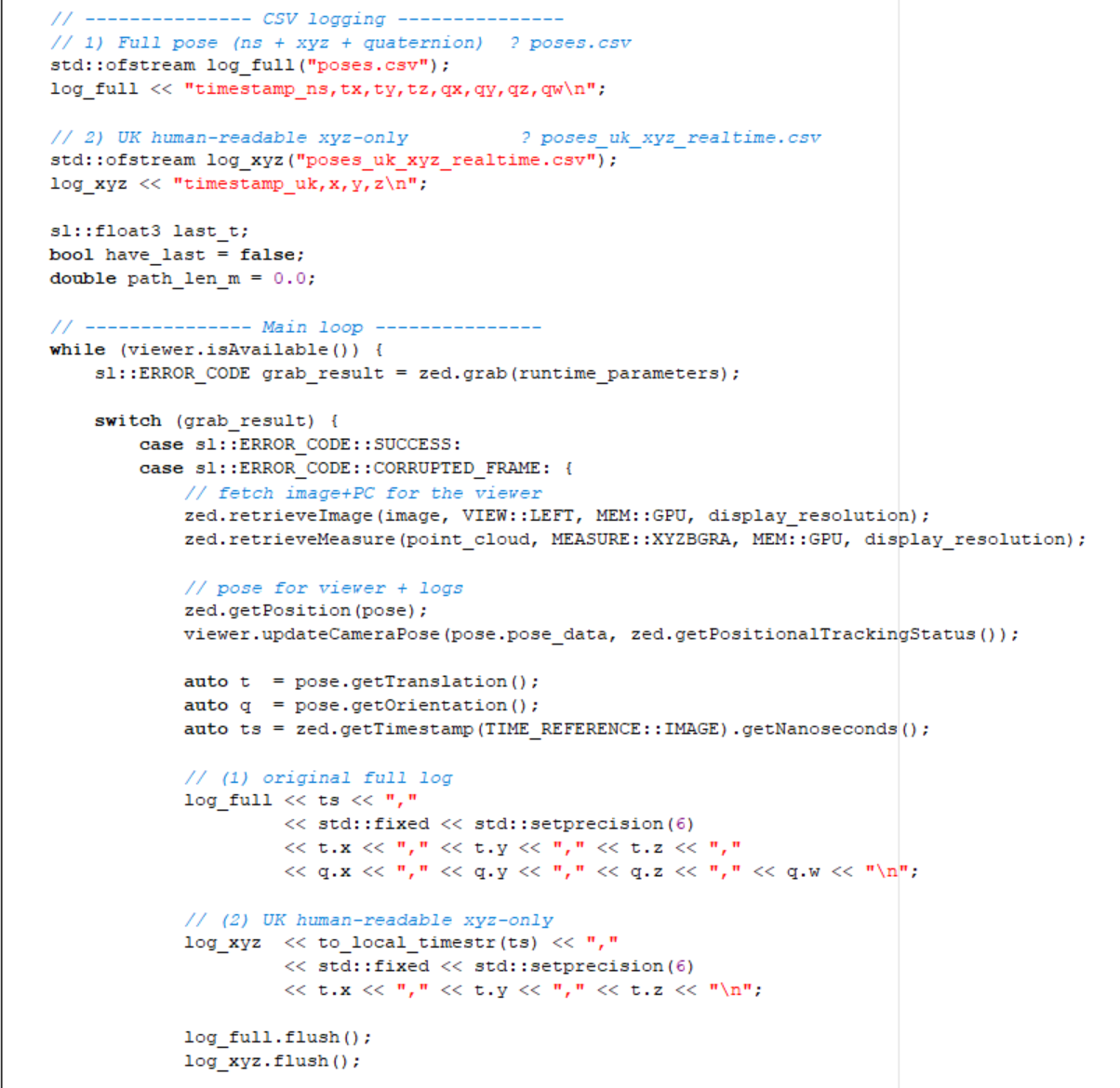
log pose (XYZ + quaternion + timestamp) to CSV.
However, after running the program, I still notice no difference or improvement in drift. This drift is a problem because it directly affects my robot’s navigation performance.
I would like your help with two things:
-
Can you please check if I applied HD720@60 and Area Memory correctly in this code? If it looks correct, why might I still see drift, and are there extra parameters I should tune (depth mode, runtime options, reprojection, etc.)?
-
How can I connect this to the Unitree Go2 robot for visual SLAM? For example, should I send the ZED pose into ROS2
/odom, or is there a recommended integration workflow between ZED SDK and Unitree SDK?
Any advice or example setups would be really helpful. I can also share the full project (ZIP + logs) if needed.
Thanks a lot for your support!
[Here is the code:
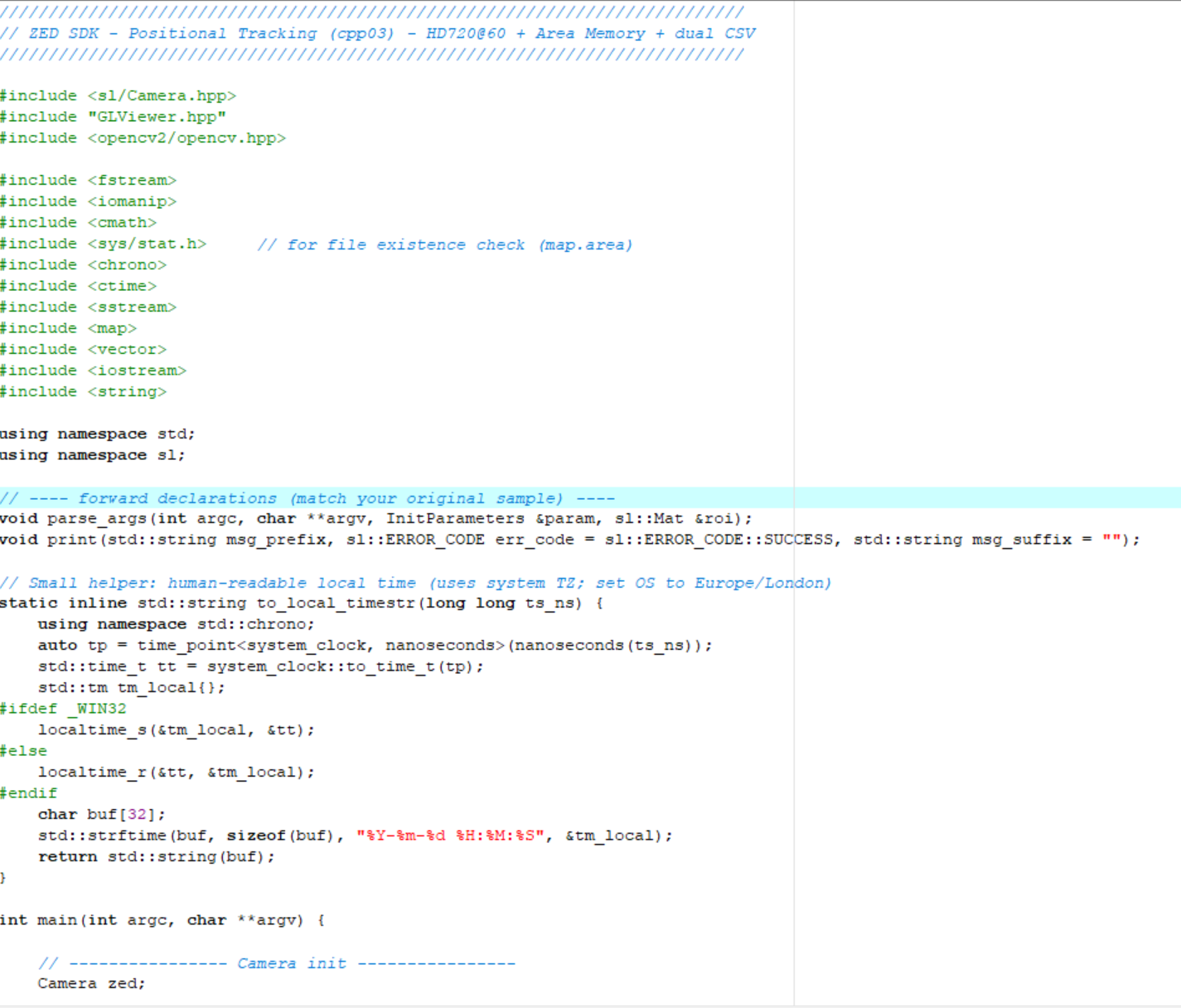
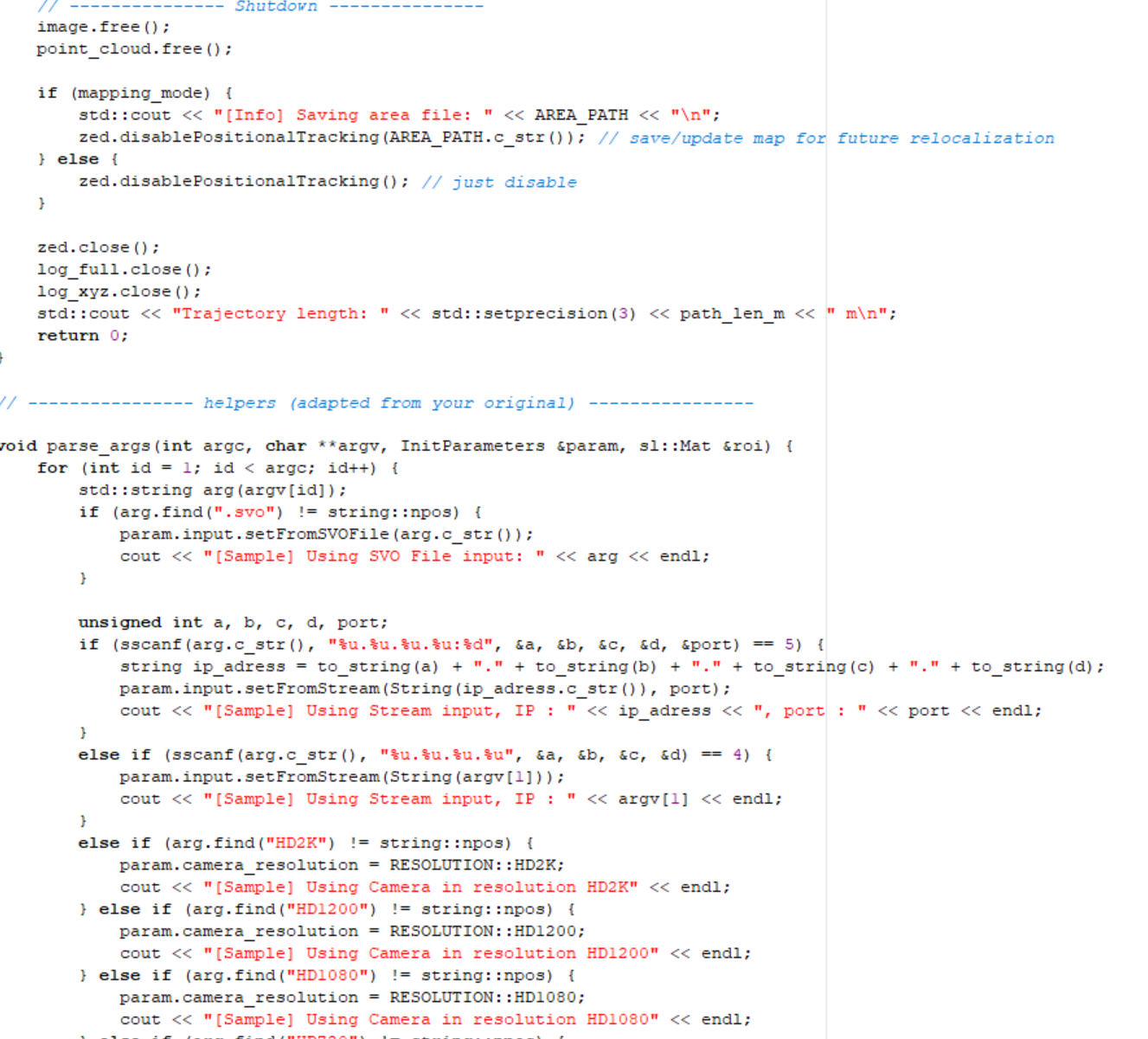
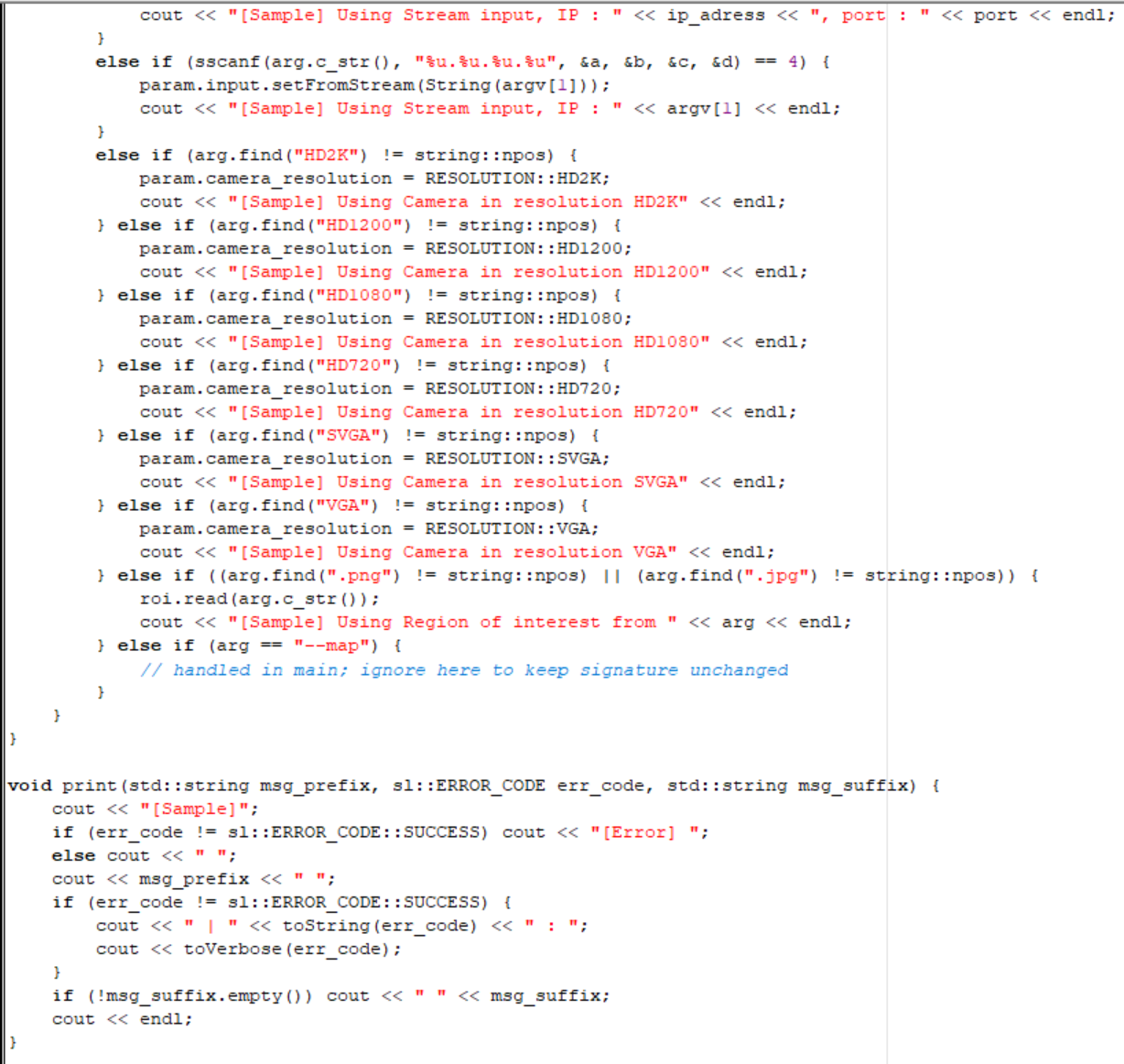
]