When I updated the original sdk3.7 to version 3.8, using the camera’s depth sensing NEURAL mode, there will be two regular rectangular noise areas, and I can’t find the reason for the problem. After I lower the sdk version back to 3.7, this situation disappears again, I wonder how can I solve this problem under 3.8 version?

Hi @wzh_33
Welcome to the Stereolabs community.
Can you try to clean the AI model and re-optimize it?
You can find a guide on this support page.
I tried the method you provided, but it didn’t work. I used it on a 3080+12700kf and ZED Diagnostic checked that everything was OK. But when I also used sdk3.8 and cuda11.7, there was no such problem running on another machine. I don’t know what happened to the previous machine because I can’t find the problem.
Can you verify that you are using the latest version of the NVIDIA driver for your GPU card?
Thank you for your continued help, but I can confirm that the Nvidia driver has been updated to the latest version.
Can you send a screenshot of ZED Depth Viewer?
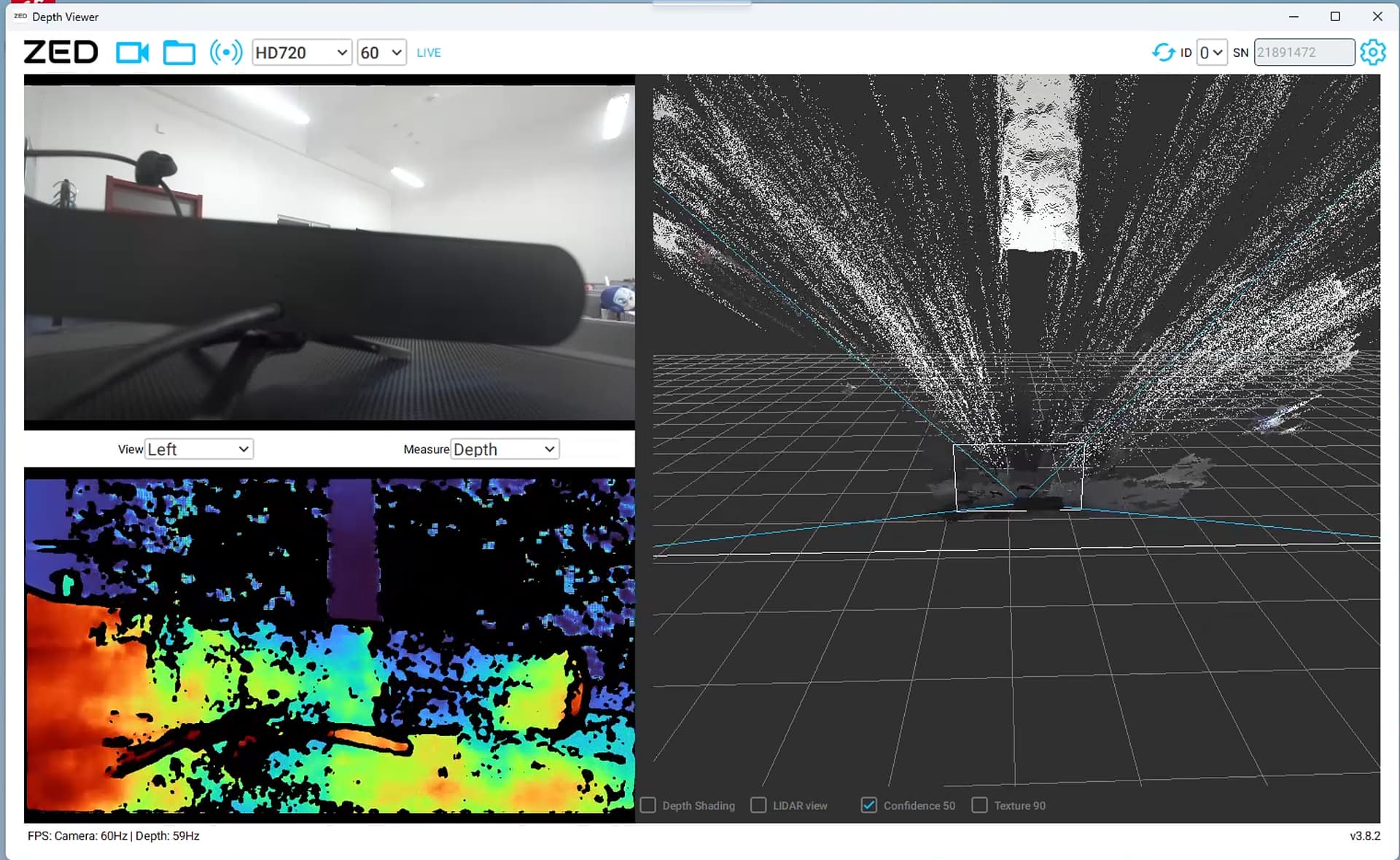
This is the display result of my ZED Depth Viewer under version 3.8.
I have now tried various solutions that I can think of, including reinstalling Windows 11, reinstalling Cuda 11.7, and so on. However, the problem is still not resolved because my recent experiment requires accurate depth data, and I am currently very anxious.
@wzh_33 can you acquire a screenshot in ULTRA depth mode to compare them?
Furthermore, please notice that bad depth maps are expected if an object is placed too close to the camera not respecting the minimum depth specification.
I don’t think it should be a distance issue because I have tested various distances.
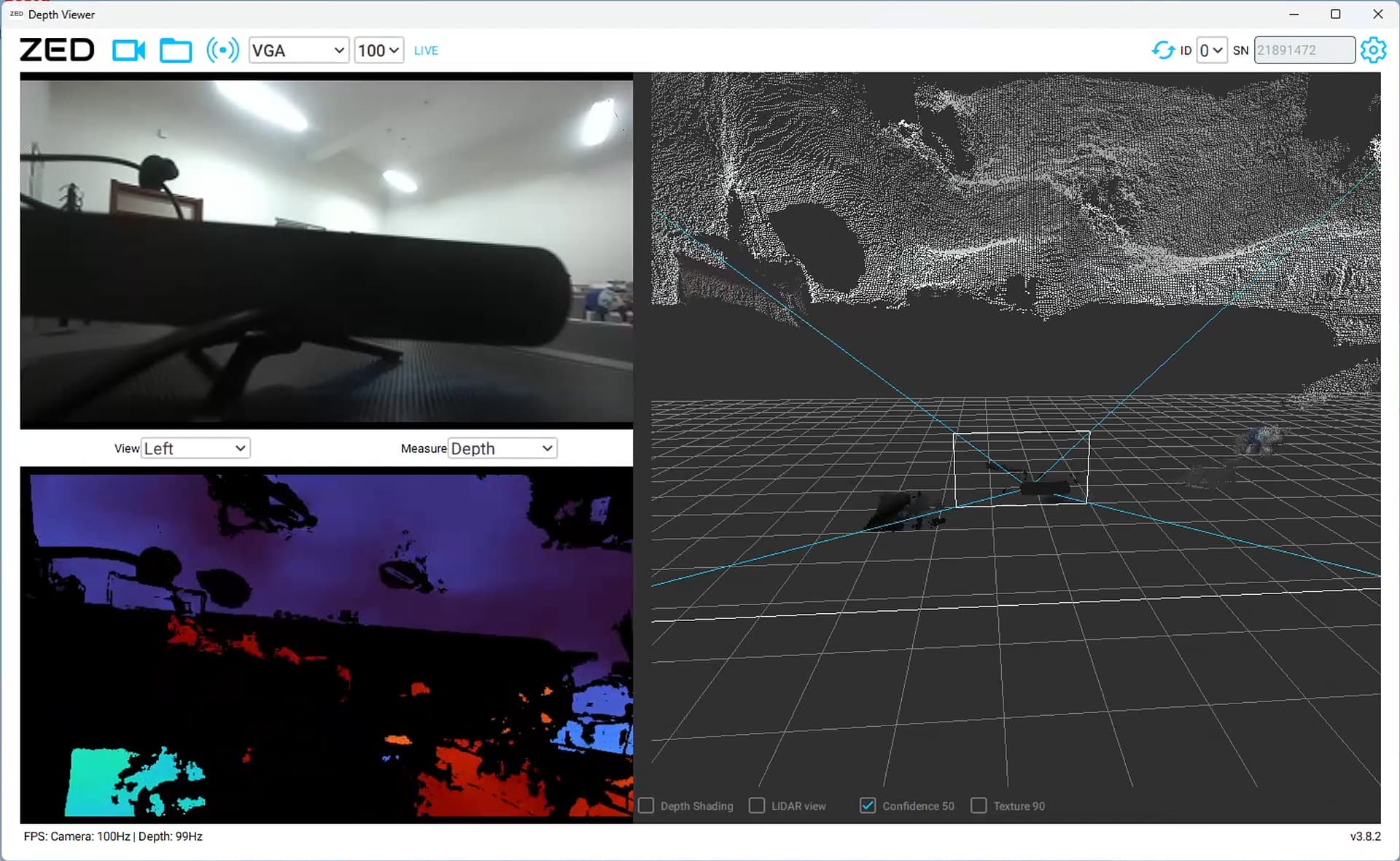
This is a screenshot of ULTRA depth mode.Apart from a small flaw caused by distance, there is no similar problem with NEURAL mode.
OK, thank you for the information.
When you said
have now tried various solutions that I can think of, including reinstalling Windows 11, reinstalling Cuda 11.7, and so on.,
did you install Win11 from scratch by formatting the disk?
I suspect that for some reason there is a conflict between the NVIDIA libraries.
Normally to solve this kind of problem we suggest uninstalling the NVIDIA driver, CUDA, and all the NVIDIA libraries, also by manually removing the NVIDIA folders still present in Program Files and Program File (x86).
When the system is clean you can then start the ZED SDK installer that will automatically guide you installing the latest supported driver and libraries.
I share your suspicion that the repeated installation of cuda caused a cuda library conflict. However, I determined that the system partition was completely formatted and the corresponding cuda 11.7 was reinstalled through sdk 3.8. This has not yet worked.
Can you run the ZED Diagnostic tool and attach the report file that it generates?
This is a ZED Diagnostic run report in the ZED 3.8 environment. I hope it can be helpful to you. In addition, I recently discovered that my camera sometimes fails to start under USB 3.0. It has been used with USB 3.0, but it still shows that I am 2.0. And sometimes remind me of ‘ USB bandwidth low ’, may this lead to abnormal recognition of depth maps?
ZED_Diagnostic_Results.json (14.0 KB)
Hi @wzh_33
the communication issue can be related to a problem of the cable or the USB3 port, but it is not surely the cause of the NEURAL depth strange behavior.
When the communication problem appears, please run the ZED Diagnostic and send the report file to support@stereolabs.com. If we confirm that it’s a cable issue and the camera is still covered by warranty we can open an RMA to replace it.
The NEURAL depth issue is instead a software problem and we are trying to understand the cause.
Have you tried the camera on another PC?
I once said that there is no such problem on another PC in the same environment. But my experiment requires using this malfunctioning PC, so I really want to solve this problem. Thank you for your continued attention to my question.
1 Like