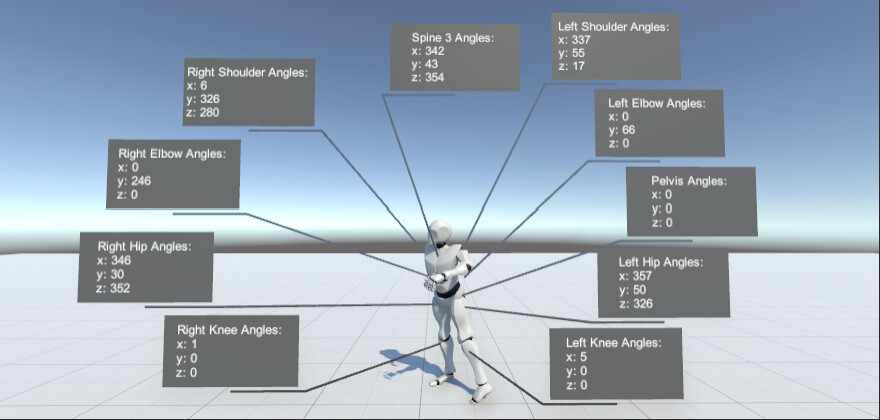
Hi, i’m getting the Quaternion data for each joint in the ZEDBodyTrackingManager script and turning it into euler angles. the problem is that the angles are unrealistic. Here’s an example
To understand how they are calculated on our side, @chklthepsps recently created a topic where he asked questions about the angles. You may want to take a look and do not hesitate to ask any questions afterward.
About why i find the angles unrealistic, i don’t think i understand how sometimes the angles in some joints fluctuate between 0 and 360 degrees. Is it because pairs of joints like elbows and shoulders turn in different directions according to the their world positions? For example the right elbow’s y axis angle is 246 while the left elbow’s y axis is 66 which looks pretty normal, is that the reason? But both of the knees x values fluctuate between values like 30 and 270, which i find quite weird because they don’t turn that much.
@NazarSmyl
That would probably be because each orientation is in a reference frame of its own, I talked a bit about it in the topic I linked. As long as the avatar does not show strange orientations, the system is working (albeit complicated, I must admit).
If you display the final rotations of the animated avatar’s limbs (so in Unity’s system), the rotations may be more understandable. This would be the rotations from the SDK transformed to fit the Unity avatar.