Hi all,
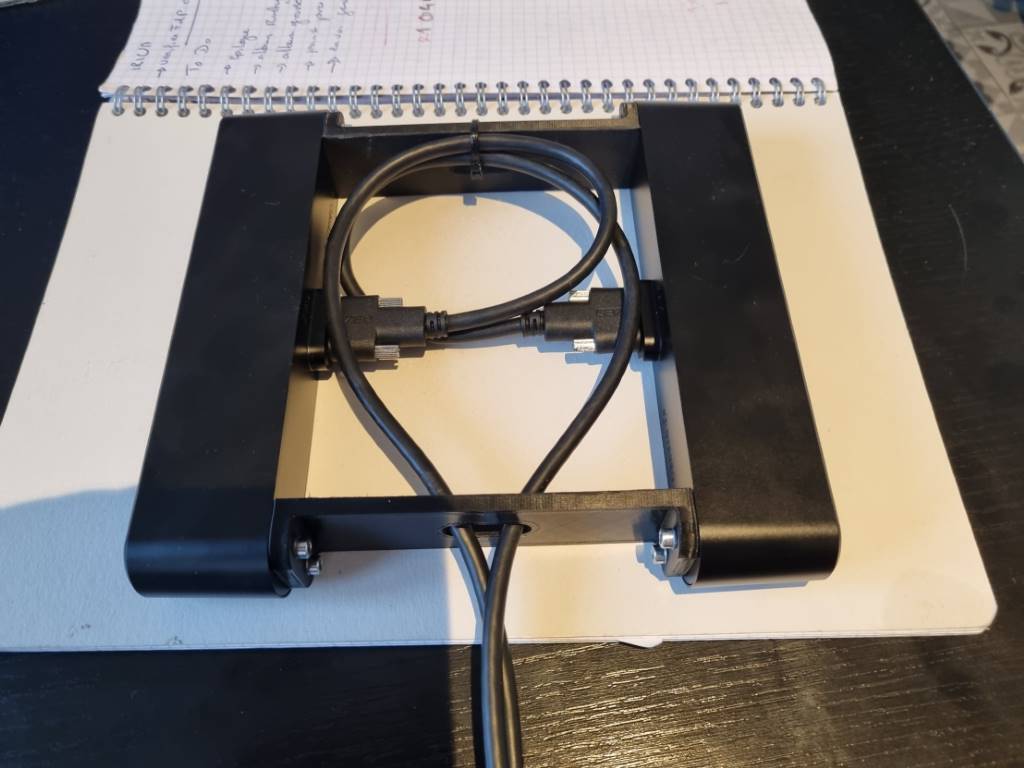
I have two Zed cameras fixed together like that :
Now I would like to display their position using the PositionnalTracking module in a OpenGL window.
I initialize them with “initial_world_transform” parameters :
positional_tracking_parameters.initial_world_transform = sl::Transform(sl::Rotation(), sl::Translation(0, 0, -75));
zed1.enablePositionalTracking(positional_tracking_parameters);
positional_tracking_parameters.initial_world_transform = sl::Transform(sl::Rotation(M_PI, sl::Translation(0, 1, 0)), sl::Translation(0, 0, 75));
zed2.enablePositionalTracking(positional_tracking_parameters);
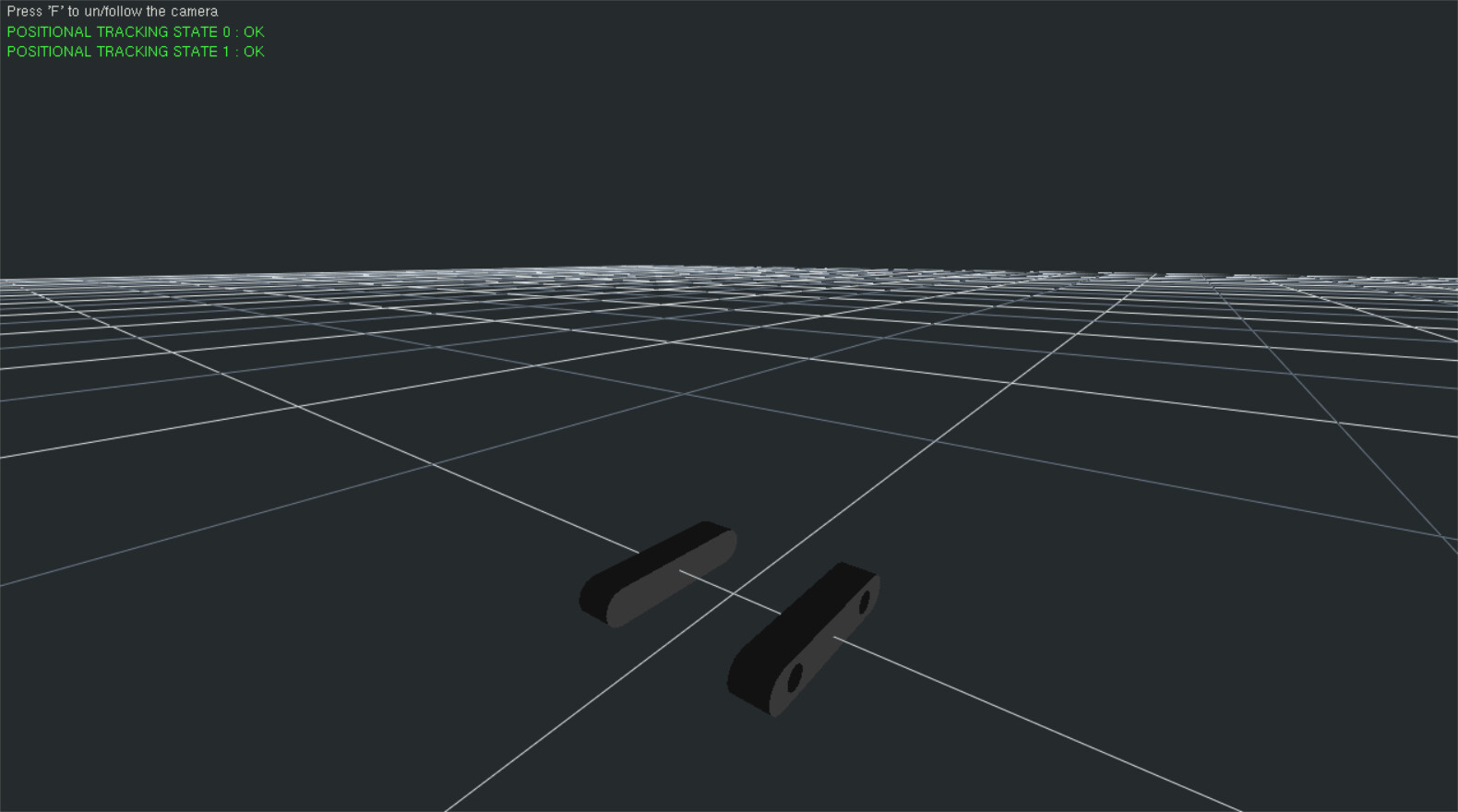
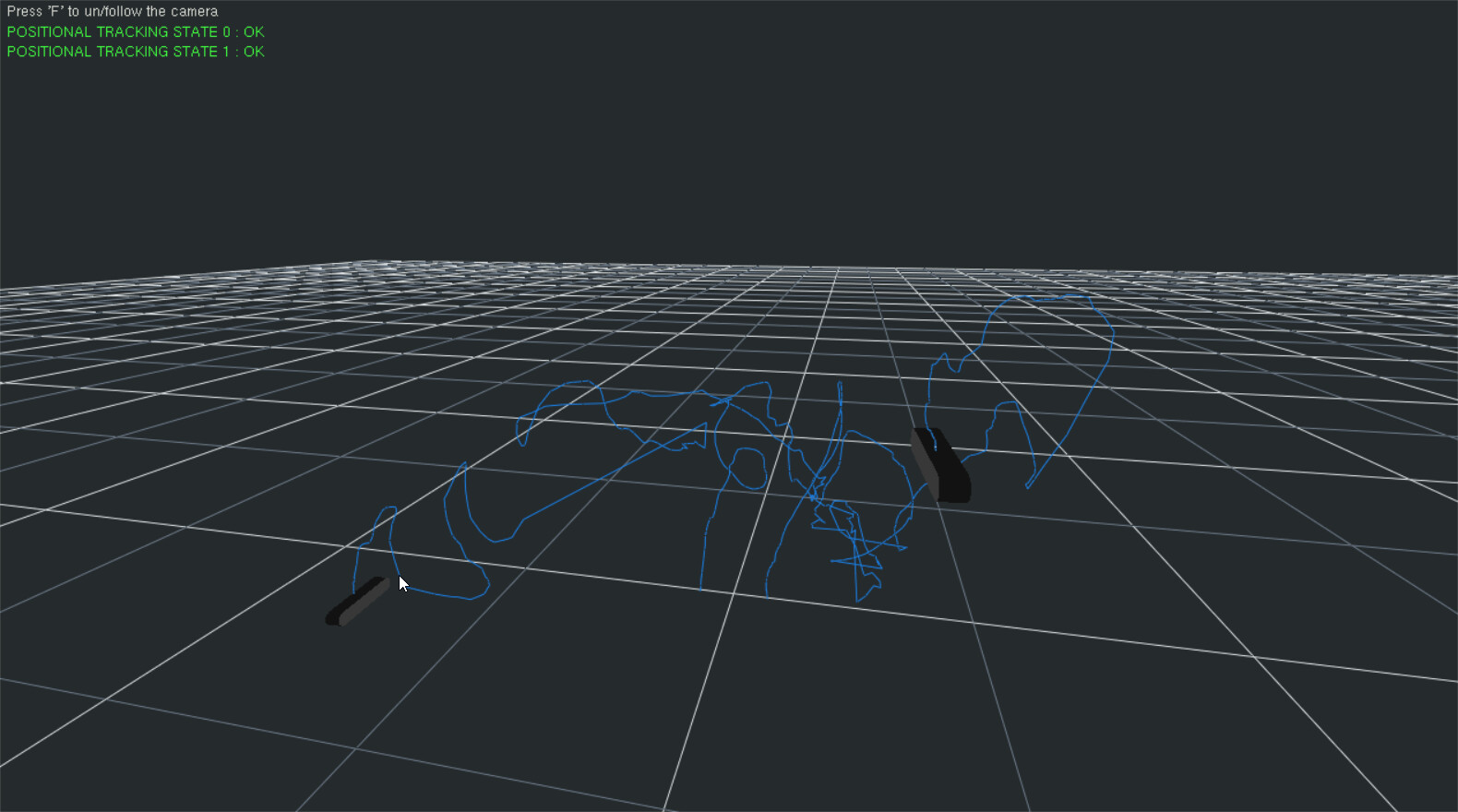
It works well but their relative positions are not synced over the time :
At initialization :
After few time :
I tried to force the second camerasrelative position synced with the first one using the enablePositionalTracking() function but this is a blocking and very consuming time function.
Is there a better way to do that ?
Thank you