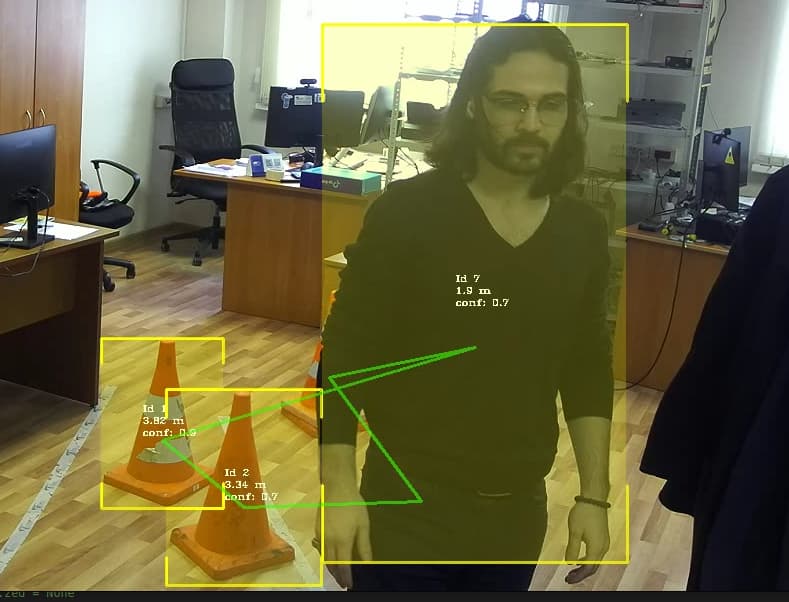
In my tracking system, two classes are used to designate cones and people. However, problems arise: when objects overlap, the class can sometimes be erroneously changed. For example, when I approach a cone, the system may incorrectly update the key points and assign me the class of a cone due to a greater number of my key points. I need help configuring the system so that it does not change the object class when it is overlapped by another object.
Could you advise how to set up the tracking to prevent this problem? Also, does my system use algorithms like SORT (Simple Online and Realtime Tracking) or Deep SORT, and how can I interact with these algorithms to adjust the identification of objects when they overlap?
@Shakir0905
That’s on me, wrong copy-paste, but the link to the doc I sent you is correct.
It’s detection_confidence_threshold and not detection_confidence.