The zed camera is fixed and static in the scene.
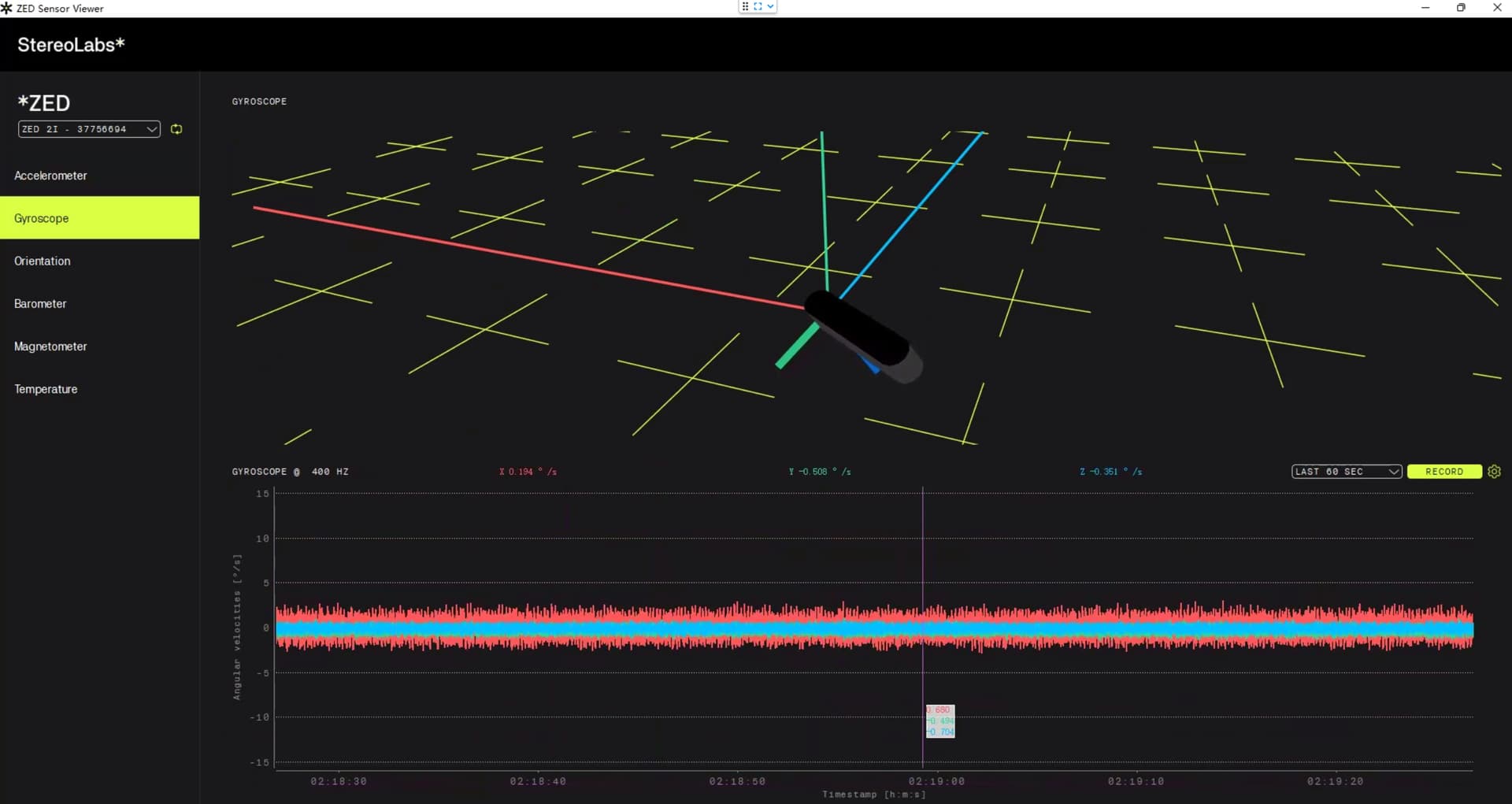
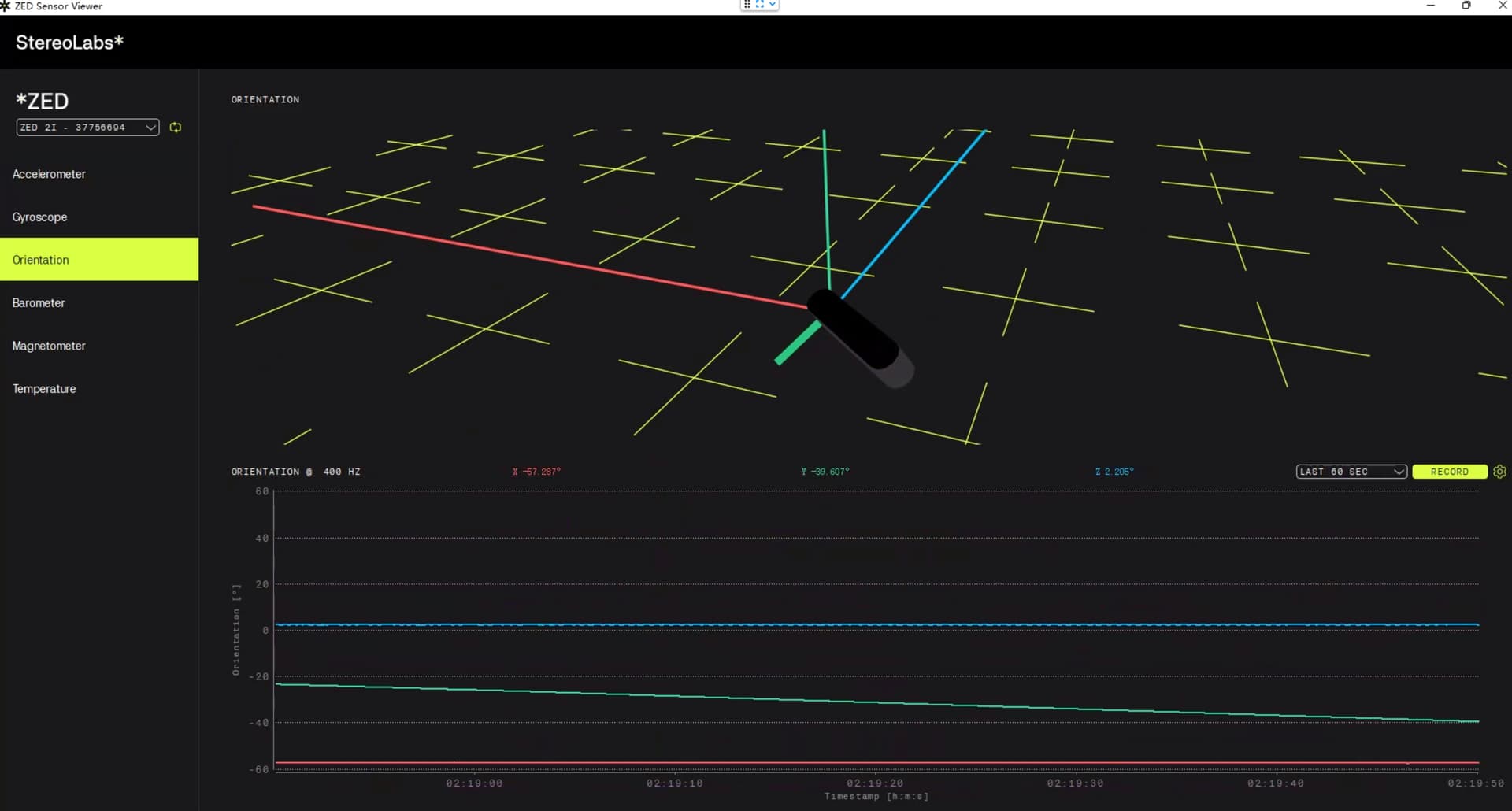
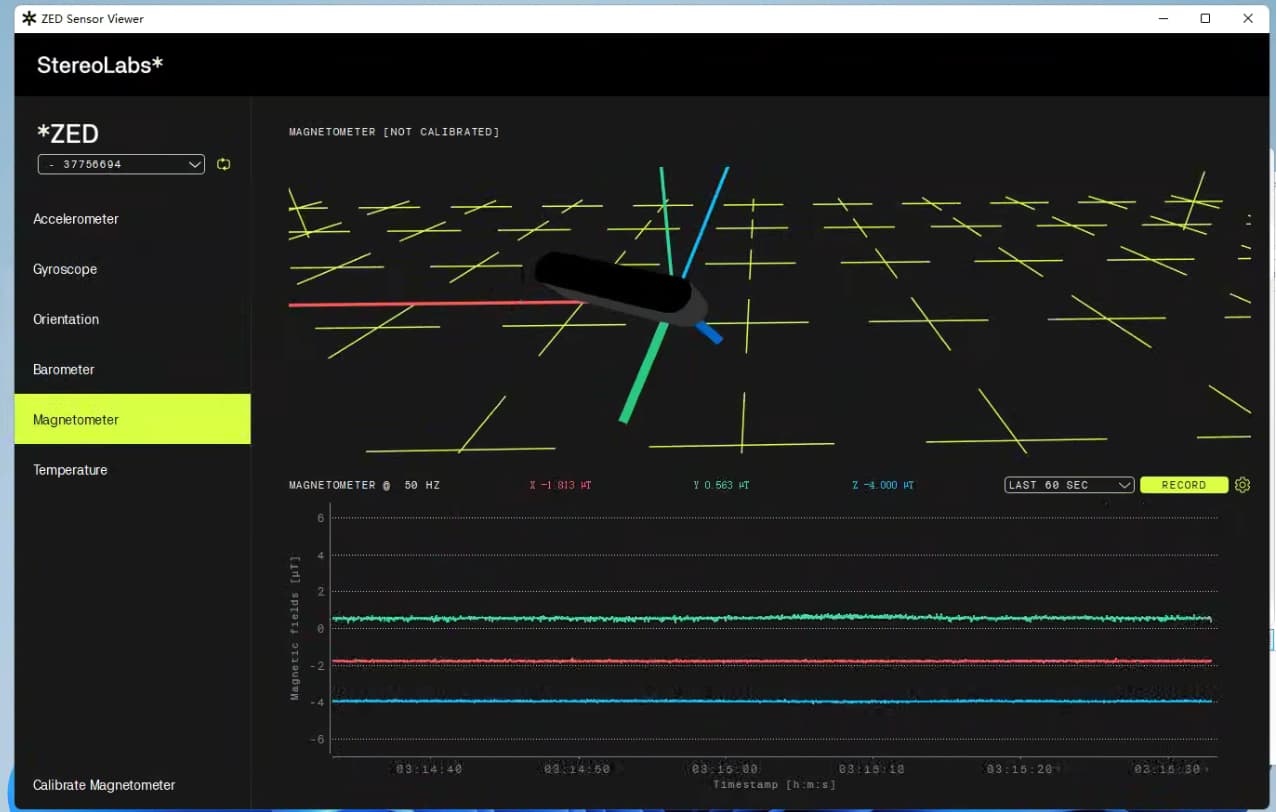
However, through the ZED Sensor Viewer, you can see that the camera’s rotation Y value is constantly changing.
This causes some strange phenomena that prevent my program from running correctly.
As follows:
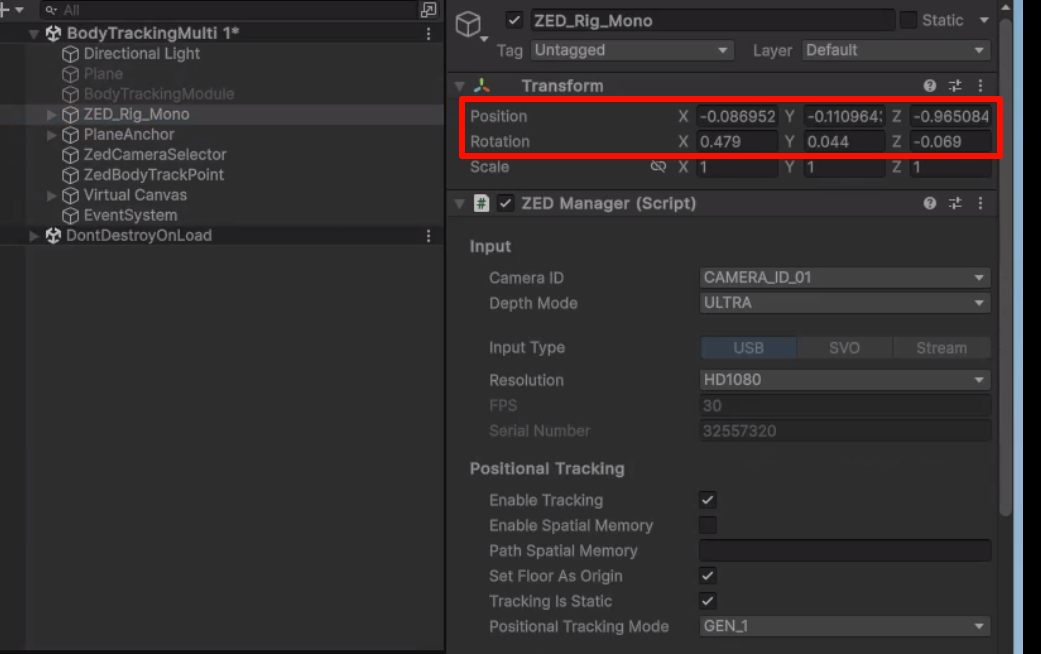
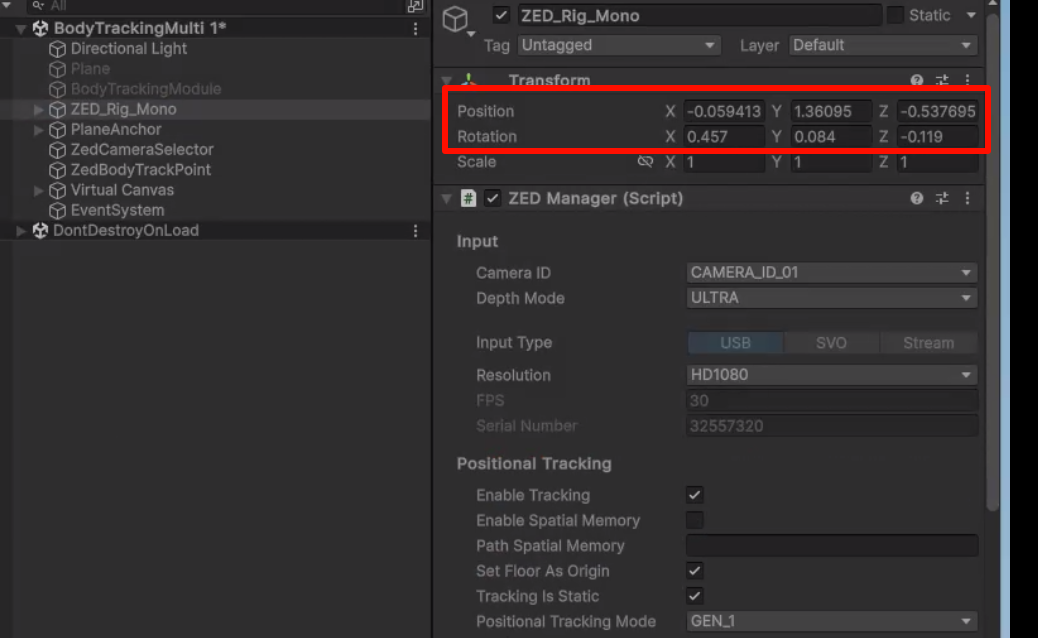
Every time zedManager is started, the Transform of zedRoot is quite different.
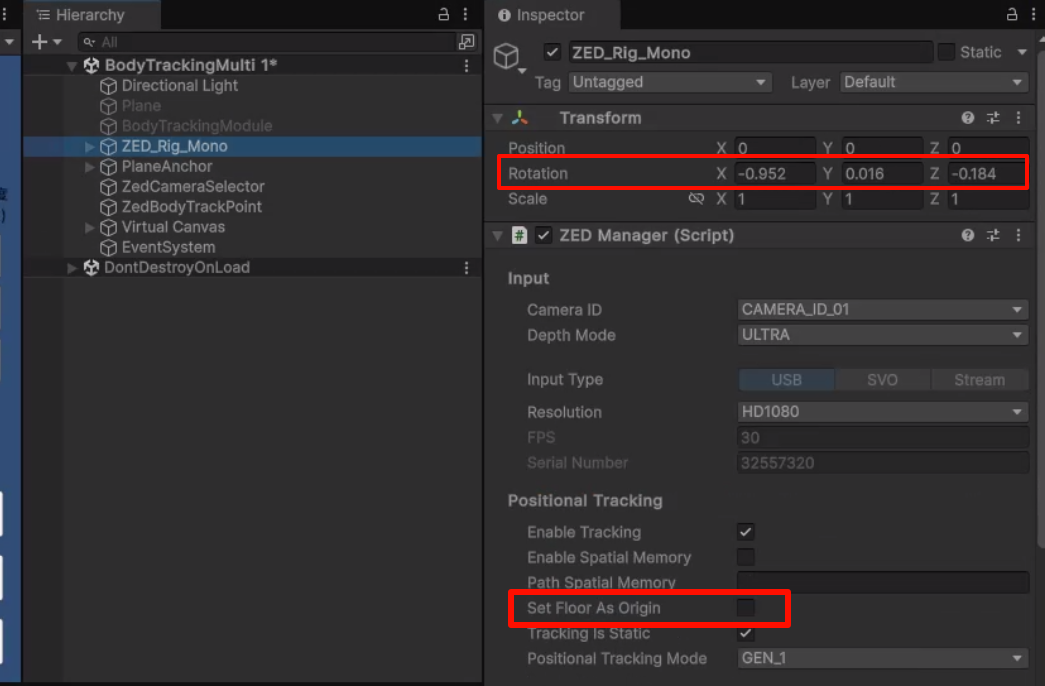
The rotation value is always close to 0 degrees, even if setFloorAsOrigin is not enabled. This is also the case when using zed.get_position(pose) in python. (The camera in reality has an angle rather than 0).
When I get the Orientation of ImuData, this value is also constantly changing. And it takes a while for the x and z values to change to the correct value, while the Y value still does not stop changing (on a normal camera, this value can get the correct value almost instantly).
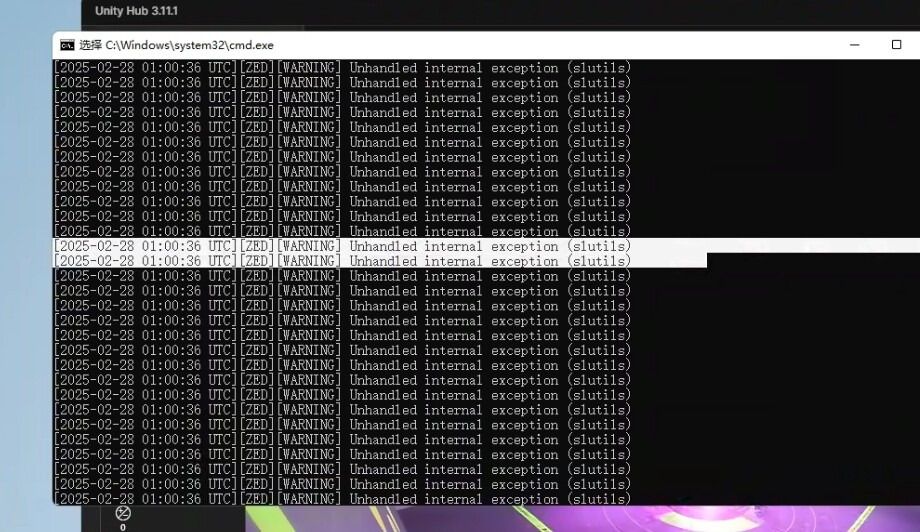
During the execution of my python program, a warning of unhandled internal exception will appear. I don’t know what happened.
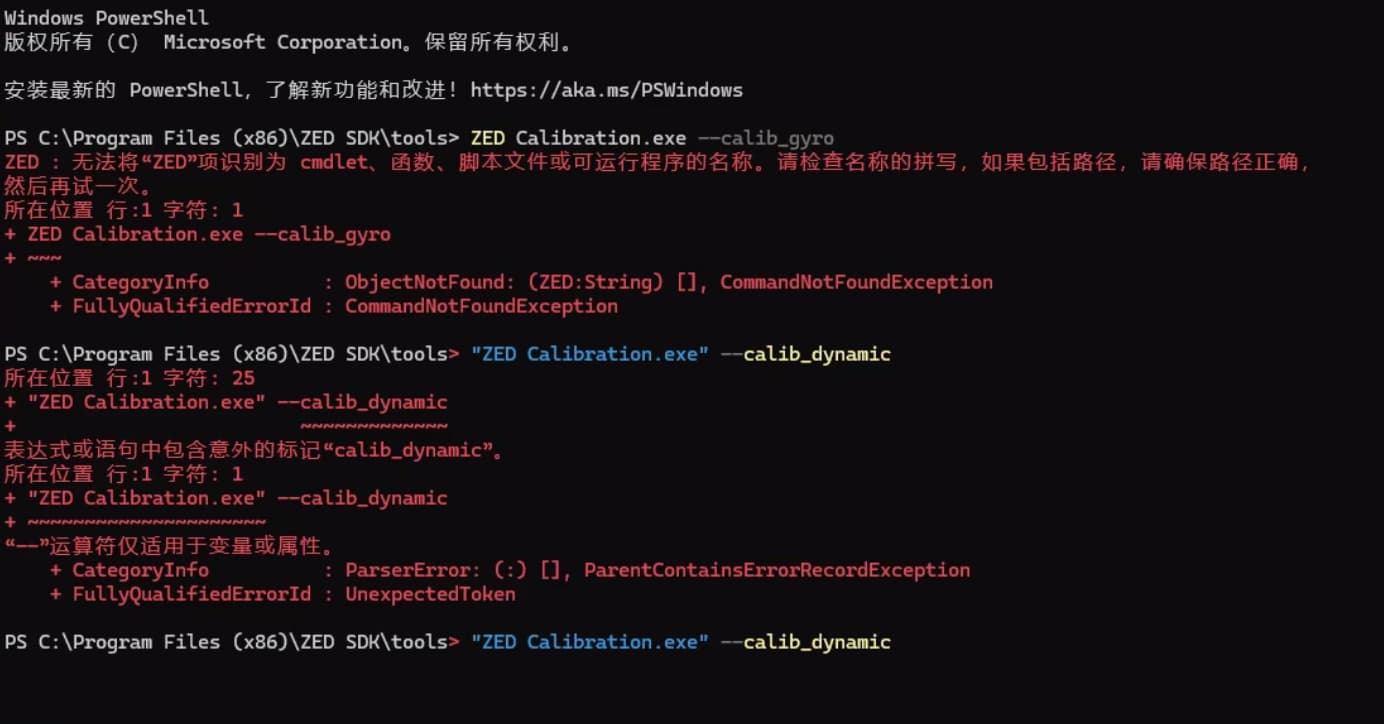
Does this command require double quotes?
If I don’t use double quotes, the terminal will get an error. Do I need to configure the name ZED in the environment variable
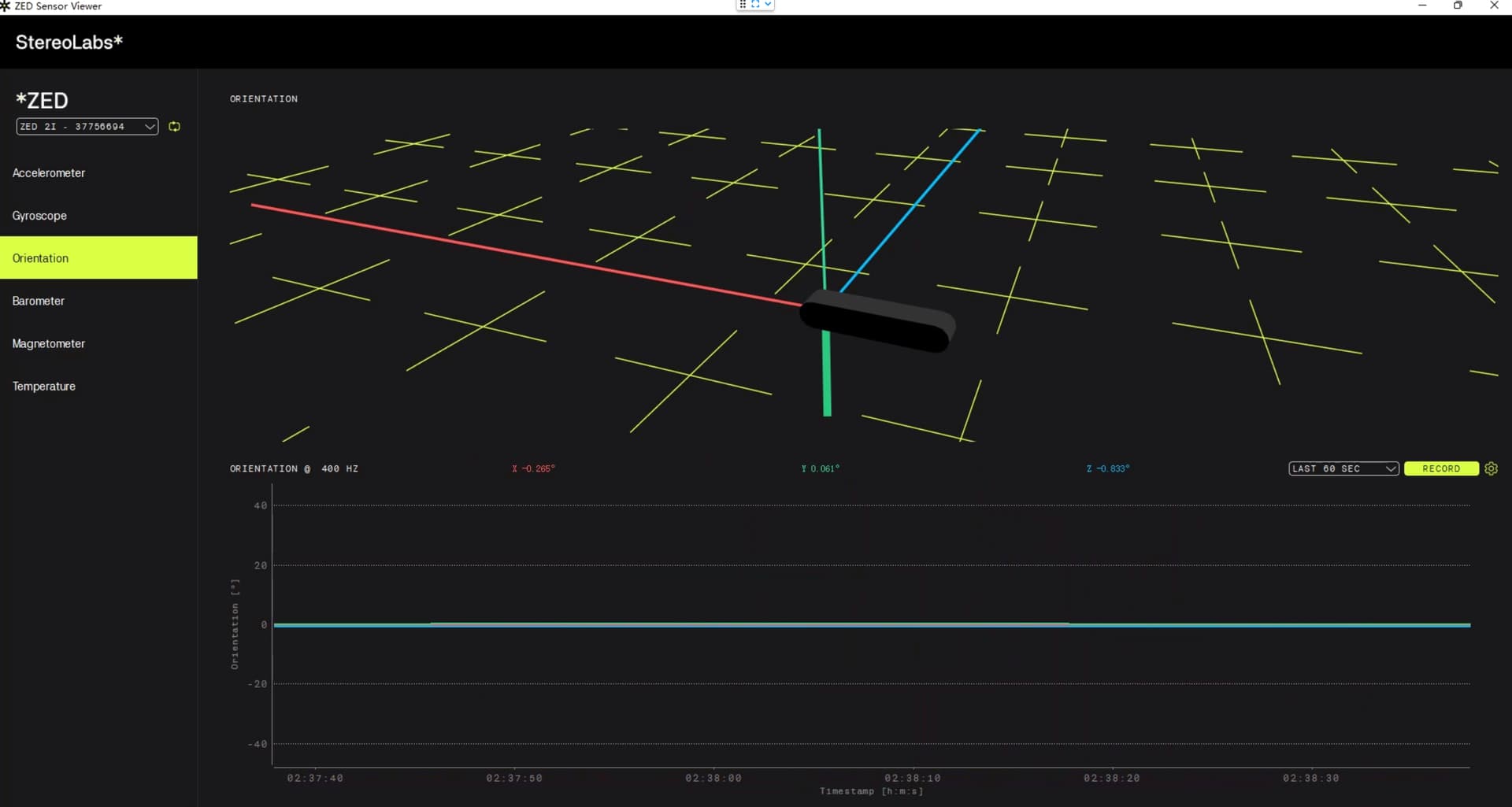
I didn’t seem to solve the drift issue after trying. The y value will jiggle within an error of 1 when placed on the ground, but the drift problem will still occur when it is mounted in the field at a certain angle
It depends on how you run it on the Windows shell.
Please note that if you place the camera on the desk and on the desk there is a laptop or a desktop PC running the fan fast, the vibrations can affect the gyroscope readings.
This is why you must recalibrate the camera on the floor.
Hello, I have tried --calib_gyro and --cimu. Neither was effective.
When I attempted --calib_dynamic,
it prompted: Remaining Positions: Right Side; Face Up; Upside Down; Left Side; Face Down;
This is confusing, and I do not know how to position it specifically.
Additionally, I am remotely instructing someone to operate it, which is very inconvenient.
Could you provide a specific instructional video?
I can only obtain the IMU data for now, then set the Y value to 0 and record this data as the camera’s pose for positioning purposes. However, I am concerned that other values may also shift in the future, or that there may be issues with other hardware or software data, which could lead to unavoidable errors at that time.At the same time, do the two commands above not working indicate a hardware issue?