Hi there,
I am trying to use the “Advanced point cloud mapping” example available in the zed-sdk on Github , but am running into issues when using it with a 2K resolution stream from my camera.
When running the spatial mapping application and using 1080p mode, the mapping works fine. However, when switching the camera to 2K mode, the “Camera view” from this application shows a black screen and the point cloud shows all points as black with no depth as below:
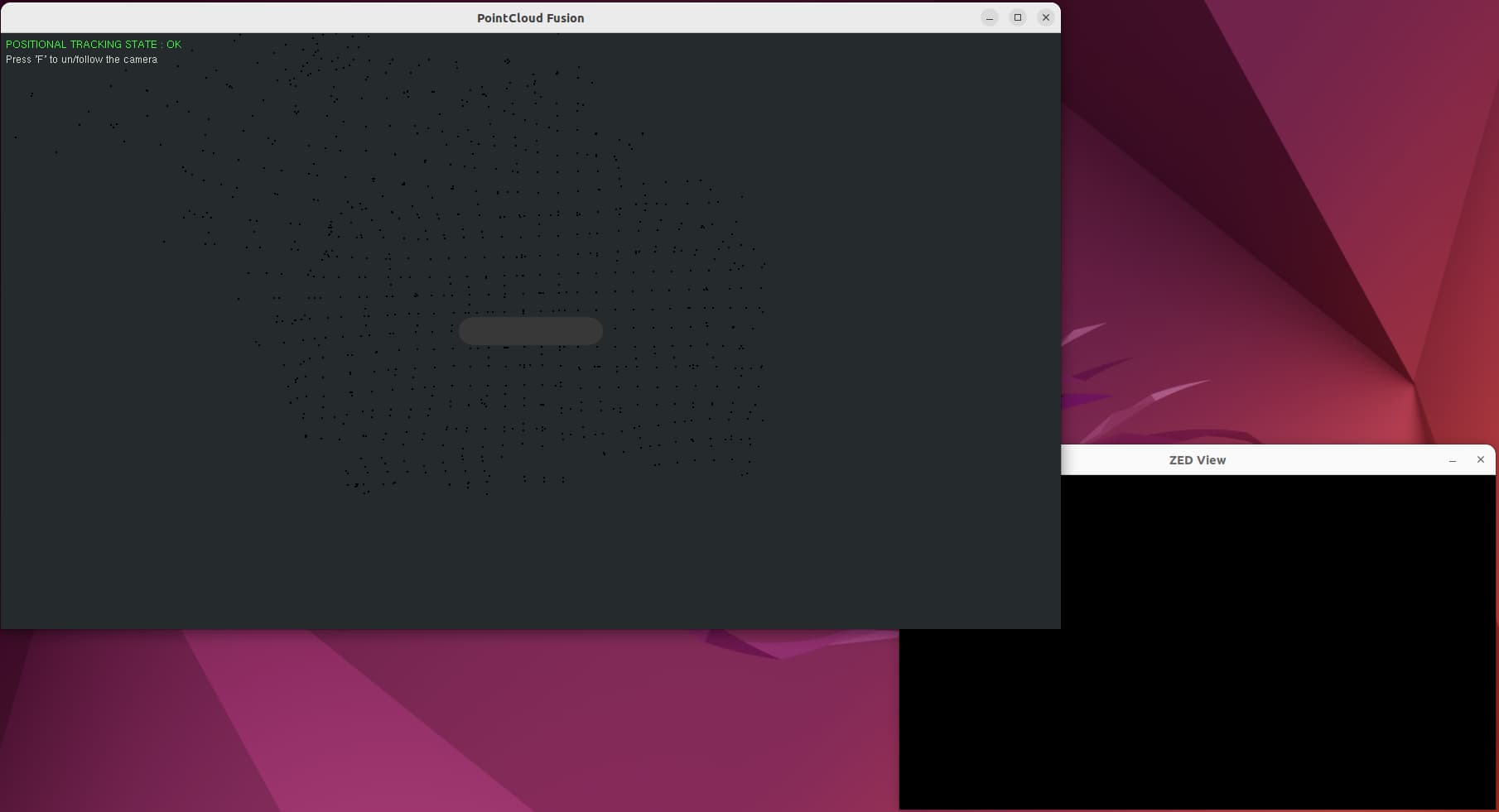
Yet, this sample application produces the correct results if feeding in a SVO recorded at 2k resolution. How can I use this application with 2K streaming mode in real time?
Specs:
- I am using a
ZED 2istereo camera with thev3.8SDK in a docker container. - I run the docker container with a command like
docker run -it --runtime nvidia --privileged --network=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix stereolabs/zed:3.8-gl-devel-cuda11.4-ubuntu20.04 - My laptop has a
NVIDIA RTX A2000 Laptop GPUand I have installed drivers for this GPU withCUDA compatibility 12.1. - I do not have CUDA natively installed on my laptop.
- The camera is connected directly to my laptop via the supplied USB-C cable. But the same issue arises when using the camera in local network streaming mode through a Jetson Nano.