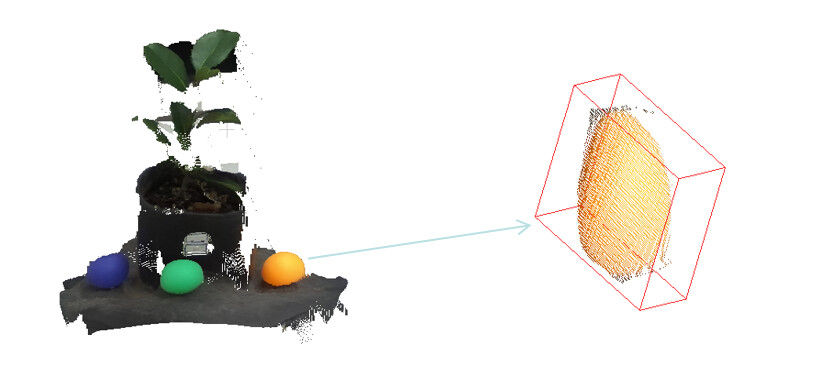
Hello, I collected point cloud data through the official SDK, but the spherical point cloud is displayed as a plane and cannot be displayed as a spherical point cloud. Why did this issue occur? Looking forward to your reply
Hi @wanghanruibaba
Welcome to the Stereolabs community.
Please provide more information, in particular:
- ZED SDK version
- depth mode
- size of the curved object
- distance of the camera from the object
SDK adopts the latest version
About 30 centimeters away from the object
The diameter of the ball is 4 centimeters
The depth mode adopts QUALITY and adjusts the Depth Min to 0.2M
However, adjusting the depth mode has little effect on the imaging quality. I suspect it is a resolution issue because binocular stereo imaging requires feature matching. When there is less feature point detection in the two images, the generated point cloud will deform and cannot fully represent the object
I recommend using ULTRA or NEURAL and set the resolution to higher values.
However, adjusting the depth mode has little effect on the imaging quality. I suspect it is a resolution issue because binocular stereo imaging requires feature matching. When there is less feature point detection in the two images, the generated point cloud will deform and cannot fully represent the object