Question - did any one try running yolov8 sample on SVO? I recorded and exported SVO2 file, which worked well. However when attempting to execute the object detection custom detection with inputting the SVO2 I’m getting a blank screen with no errors, and program exits after what seems to me a completion reading the SVO file.
Notes:
using zed2i camera input instead of the svo2 file works as expected.
exporting avi file from the recorded svo file works as expected.
Hi @izidorg
this is weird because the SVO and the Live input should not have differences.
Please try to open the SVO in ZED Depth Viewer and check that it works as expected.
Please also be sure that when using the SVO as input you set the InitParameter svo_real_time_mode to true if you want the file to keep the real-time frequency.
FYI,
the svo file ran seccessfully with ZED Depth Viewer.
the default seetting of svo_real_time_mode is true.
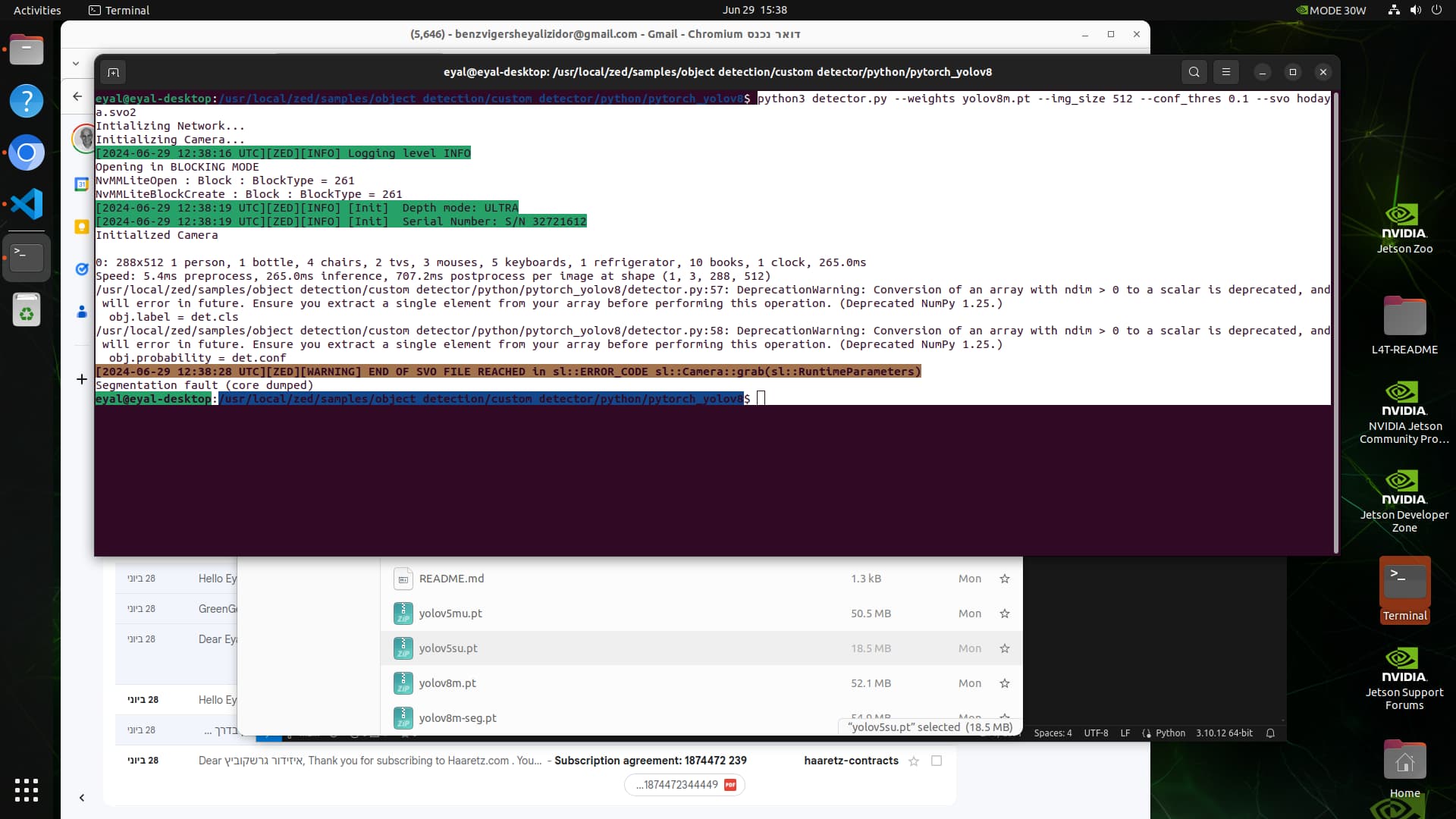
I’m attaching the screenshoot of the cli command.
Please find the logg file. The log was started prior and finished after running the following command line:
python detector.py --weights yolov8m.pt --img_size 512 --conf_thres 0.1 --svo hodaya.svo2 logg (81.2 KB)
In addition I’ve tested the spatial mapping cpp and python.
CPP:
/usr/local/zed/samples/spatial mapping/spatial mapping/cpp/build/ZED_Spatial_Mapping hodaya.svo2 > log.txt
using some additional commands: w,d,l.
the log.txt is too big to upload here, but most of it contains the following text on each lines:
[2024-07-14 06:29:08 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:11 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:15 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:18 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:22 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:25 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:29 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:33 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:36 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:40 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:43 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:47 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:50 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:54 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:29:58 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
[2024-07-14 06:30:01 UTC][ZED][WARNING] END OF SVO FILE REACHED in sl::ERROR_CODE sl::grab(sl::RuntimeParameters)
the spatial mapping display has been opened and showed the right display but it didn’t change over the testing time (like freezing).
PYTHON:
for the CLI command: python spatial_mapping.py --input_svo_file hodaya.svo2, the application worked but completely ignored the svo file, showing only the camera input and proper mesh on top of the camera captures.
Note: the complete ignorance of the svo file was as well on the python depth sensing app.
Can you please verify my reporting findings on your hardware?
I am also able to reproduce the issue on the C++ sample, I logged this internally so that we can investigate further, but it seems related to the sample itself.
I’ve tested again according yours recommendation, and I haven’t seen any change, so that the expected behaviour is still not there. Can you please record and playback the svo file in your setup, and if it will work okay is it possible to you to send me your link so I can clone it in my AGX Orin HW?