ros2 service call /zed_multi/cam0/start_svo_rec zed_msgs/srv/StartSvoRec "{svo_filename: ‘251118_cam0.svo2’, compression_mode: 1}”
ros2 service call /zed_multi/cam1/start_svo_rec zed_msgs/srv/StartSvoRec “{svo_filename: ‘251118_cam1.svo2’, compression_mode: 1}”
But I met **“waiting for service to become available…”
**
Actually, I found start_svo_rec service is ope after commanded service call
and below is service list:
/zed_multi/cam0/describe_parameters
/zed_multi/cam0/enable_streaming
/zed_multi/cam0/get_parameter_types
/zed_multi/cam0/get_parameters
/zed_multi/cam0/list_parameters
/zed_multi/cam0/set_parameters
/zed_multi/cam0/set_parameters_atomically /zed_multi/cam0/start_svo_rec
/zed_multi/cam0_state_publisher/describe_parameters
/zed_multi/cam0_state_publisher/get_parameter_types
/zed_multi/cam0_state_publisher/get_parameters
/zed_multi/cam0_state_publisher/list_parameters
/zed_multi/cam0_state_publisher/set_parameters
/zed_multi/cam0_state_publisher/set_parameters_atomically
/zed_multi/cam1/describe_parameters
/zed_multi/cam1/enable_streaming
/zed_multi/cam1/get_parameter_types
/zed_multi/cam1/get_parameters
/zed_multi/cam1/list_parameters
/zed_multi/cam1/set_parameters
/zed_multi/cam1/set_parameters_atomically /zed_multi/cam1/start_svo_rec
/zed_multi/cam1_state_publisher/describe_parameters
/zed_multi/cam1_state_publisher/get_parameter_types
/zed_multi/cam1_state_publisher/get_parameters
/zed_multi/cam1_state_publisher/list_parameters
/zed_multi/cam1_state_publisher/set_parameters
/zed_multi/cam1_state_publisher/set_parameters_atomically
/zed_multi/state_publisher/describe_parameters
/zed_multi/state_publisher/get_parameter_types
/zed_multi/state_publisher/get_parameters
/zed_multi/state_publisher/list_parameters
/zed_multi/state_publisher/set_parameters
/zed_multi/state_publisher/set_parameters_atomically
How can I fix this problem and record svo file??
please let me know the way ASAP
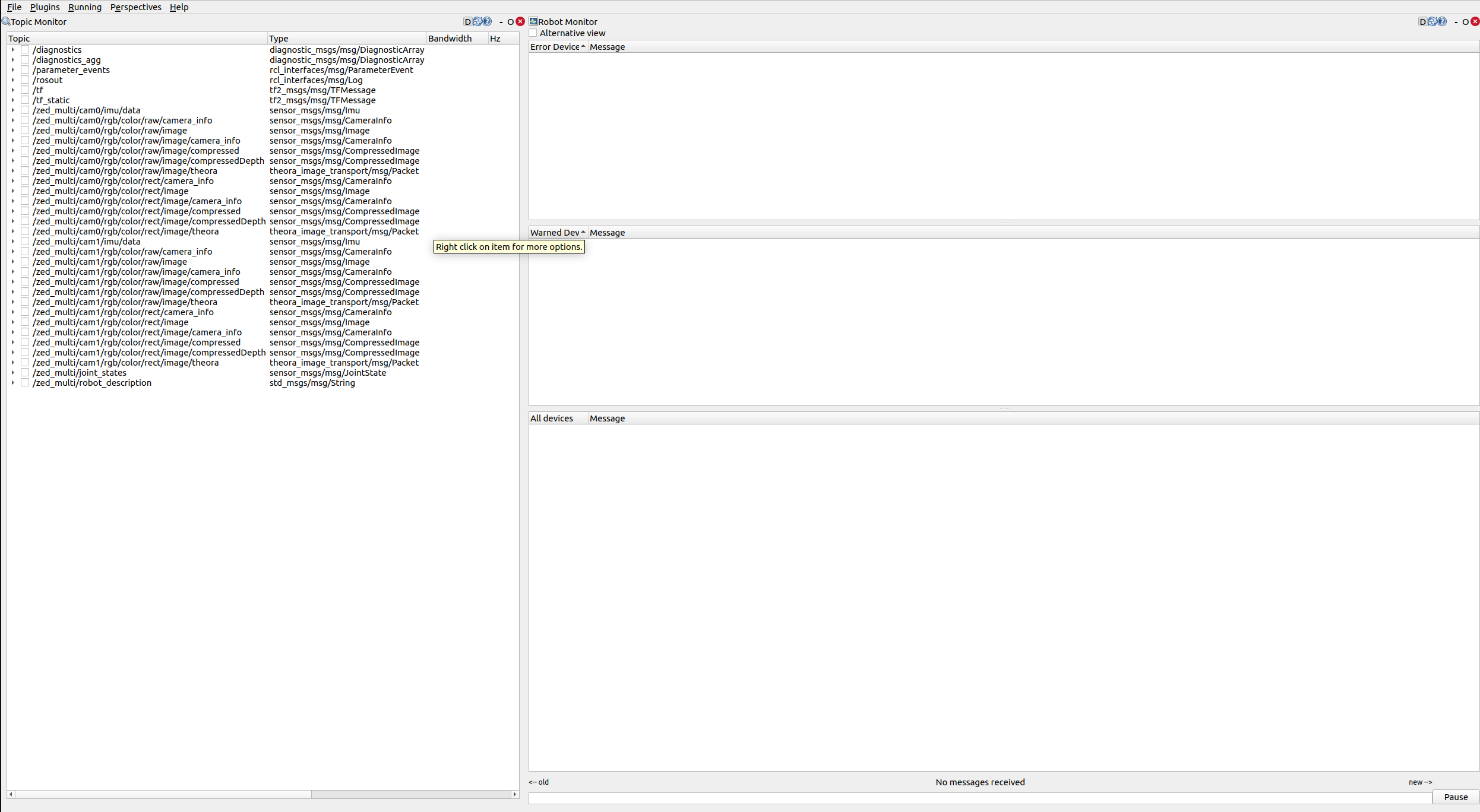
No, this is a diagnostic collector. For single node diagnostic you must install and use “Runtime monitor”: sudo apt install ros-humble-rqt-runtime-monitor
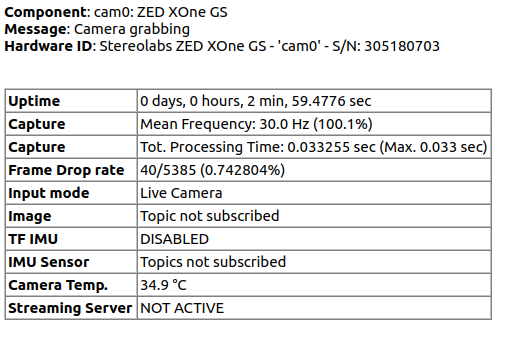
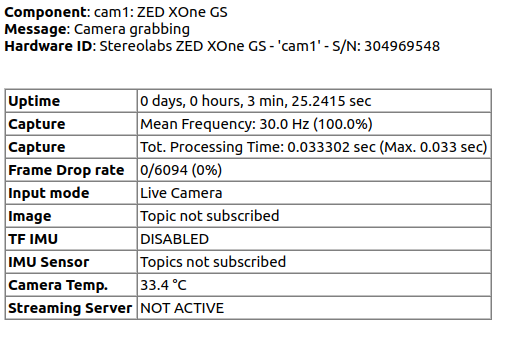
The ZED X One nodes are working as expected, but you cannot record SVOs using the ZED ROS2 Wrapper because this feature is not enabled for the ZedCameraOne component.
You can use ZED_Studio to record synchronous SVOs.
SVO support will be added to the ZedCameraOne component in a few days.
It has been previously removed because of a few issues with the versions of the ZED SDK older than v5.1.