Why do I get a 3d bounding box with zed2i code with the following [[ -18.749 -110.07 -321.01]
[ -18.749 -132.67 -467.02]
[ 129 -134.28 -466.78]
[ 129 -111.67 -320.76]
[ -16.681 75.718 -349.77]
[ -16.681 53.117 -495.78]
[ 131.06 51.511 -495.53]
[ 131.06 74.112 -349.52]] Why isn’t the value of the Y-axis the same, shouldn’t it be a cube
Hi @XueFu,
Your coordinates do show a box, but it seems angled, which is not supposed to happen, it should be aligned with the gravity.
- I assume your camera is slightly angled, is that correct?
- Is there more angle in the box when you tilt the camera even more?
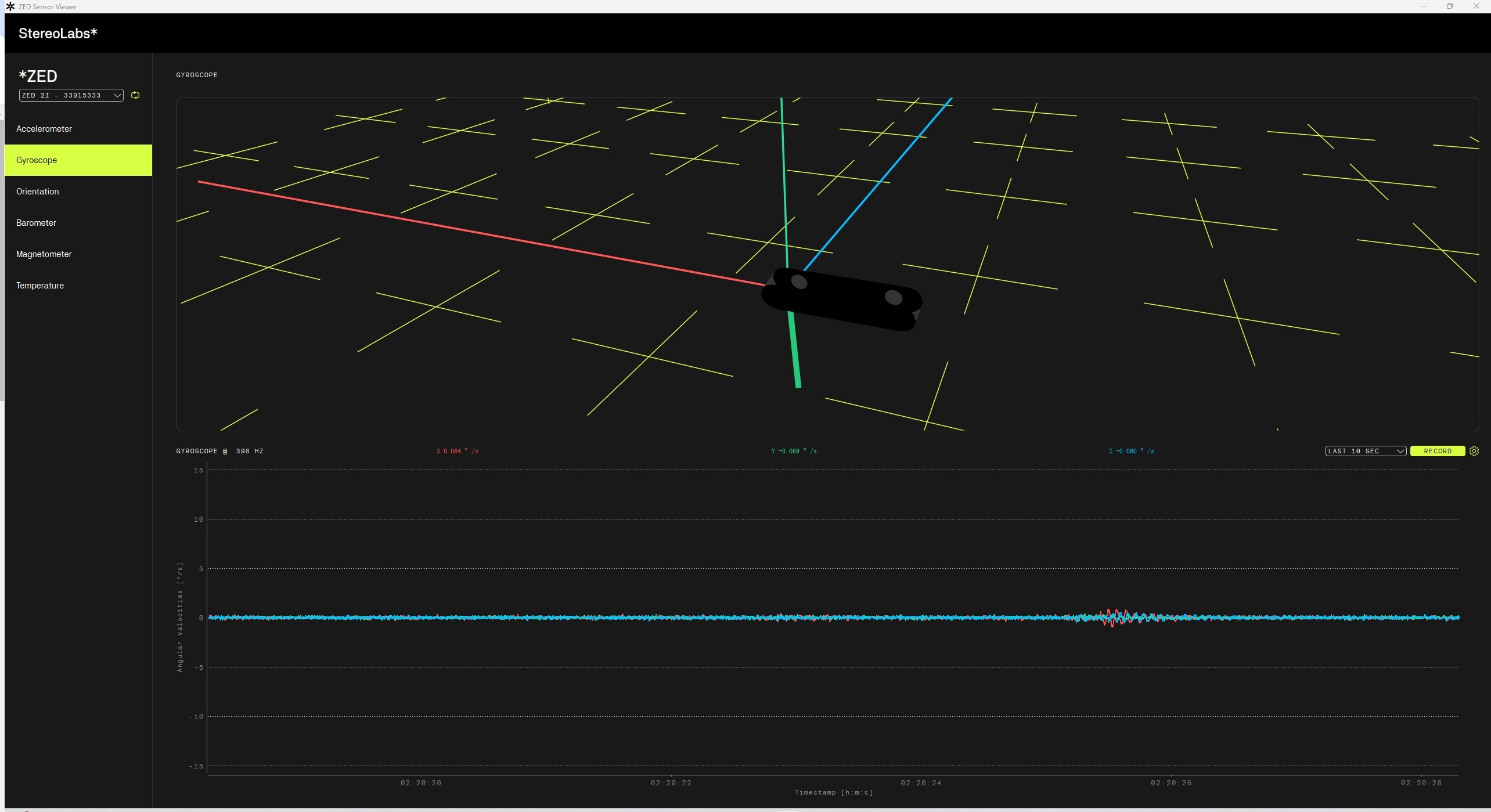
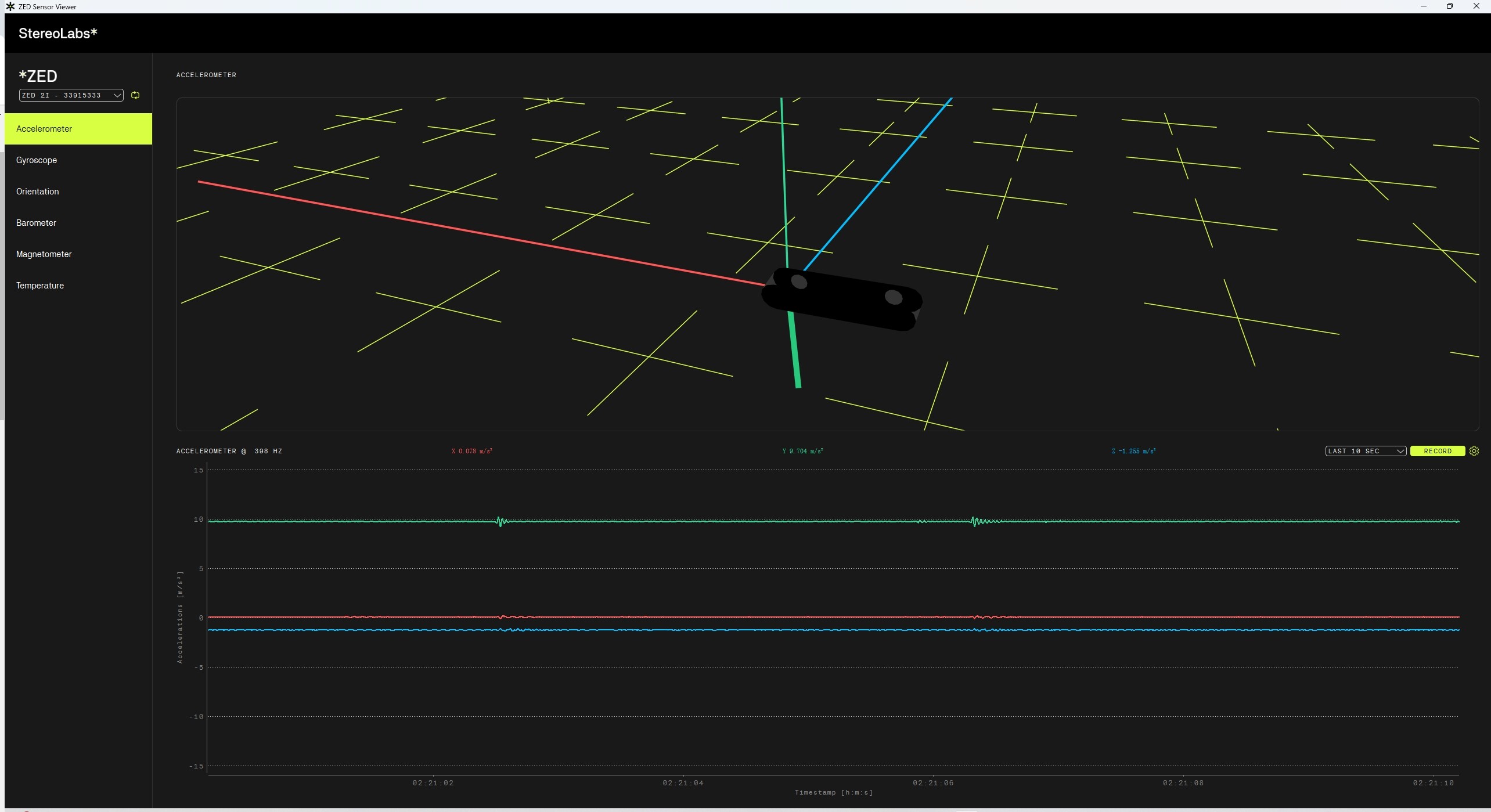
- In the ZED Sensor Viewer tool, do you see correct inclinations when you move your camera? This is to check if the IMU could be at fault.
- Please send us either here or to support@stereolabs.com:
- an SVO from your camera, reproducing this issue.
- a ZED Diagnostic file from your computer.
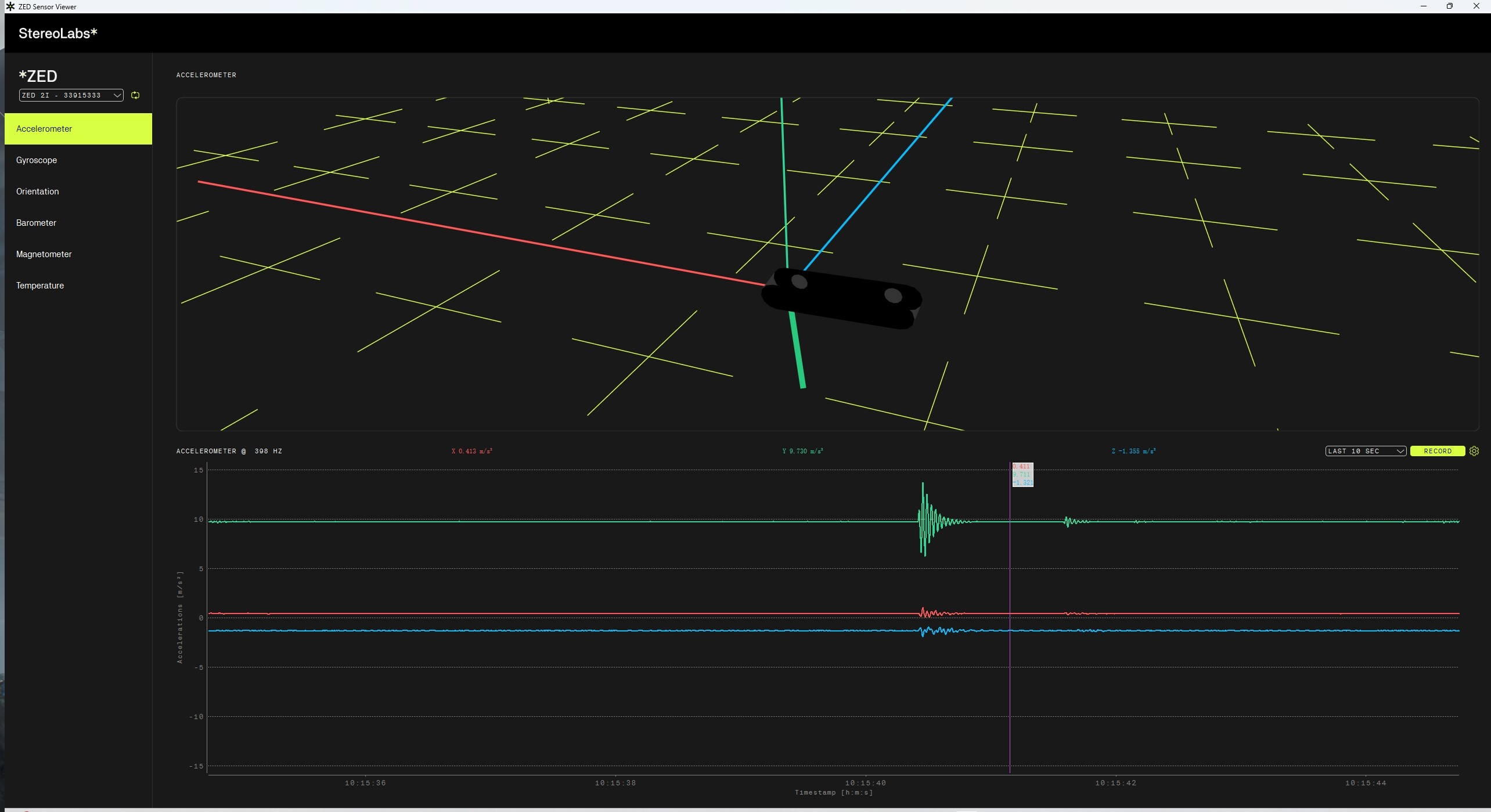
Please check that the IMU is stable (Accelerometer, Gyroscope) when the camera doesn’t move.
The SVOs will be really valuable for investigating this on our side, please send them along with a ZED Diagnostic file if you want us to look into this further.
OK,thanks a lot, this is my ZED Diagnostic file. What is SVOs, and The images below were taken without moving the zed camera,is this normal
ZED_Diagnostic_Results.json (16.1 KB)
@XueFu
Thank you for the diagnostic.
SVO is our proprietary video format.
It allows replaying a ZED camera sequence as if the camera were live, so we should be able to reproduce and investigate your issue more easily.
You can learn more about it on our documentation: Video Recording - Stereolabs
You can record an SVO easily using the button at the bottom of ZED Explorer’s window.
Note: you can use our Python samples with an SVO file, it can be easier to develop. By default, it’s done by adding --input_svo_file <path/to/video.svo(or .svo2)> in the app parameters in the command line.
HD720_SN33915333_09-37-22.svo2 (2.1 MB)
This is the SVO I recorded through ZED Explorer’s window
Hi @XueFu,
It appears you have shared the same issue on two different community topics, will be closing this one and will respond to the other ticket.