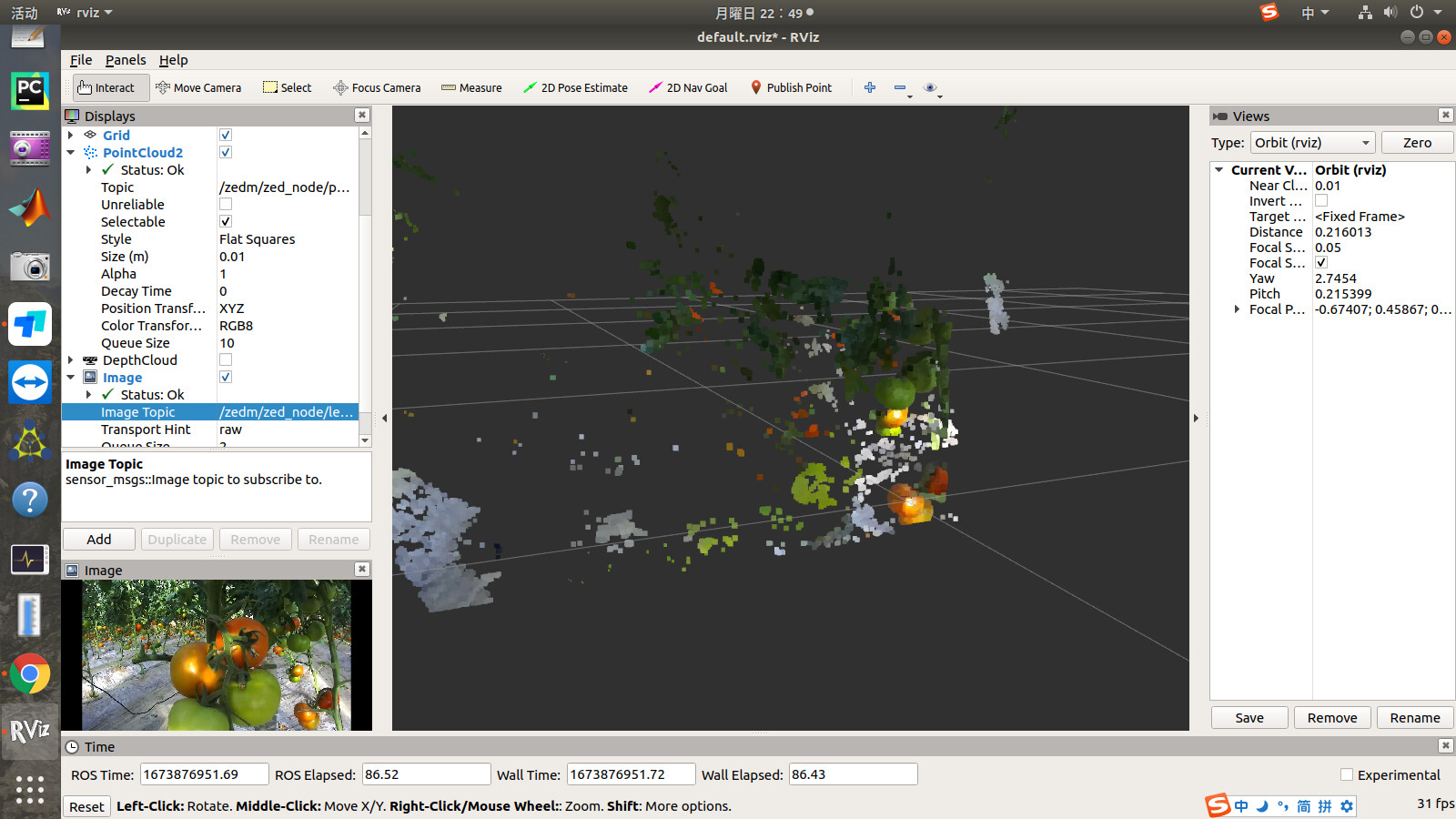
This is the point cloud information viewed through rviz

This is the point cloud information viewed through ZED_ Depth_ Viewers
Hi @kankanzheli
Welcome to the Stereolabs community.
If you want to see the same point cloud in Rviz as the point cloud that you see in ZED Depth Viewer you must use the same parameters:
- Camera resolution
- Depth mode
- Depth Confidence
- minimum depth value
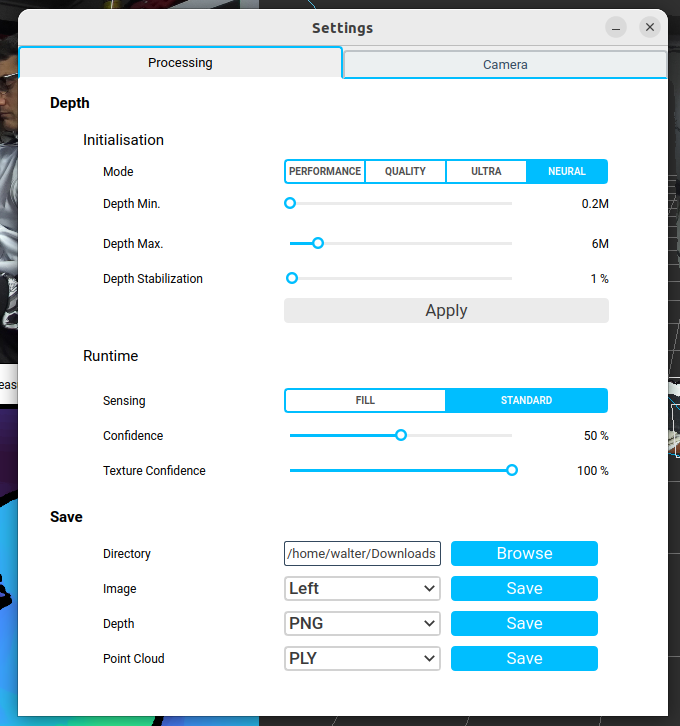
They are available in the configuration file common.yaml and zedm.yaml.
You can read more in the online documentation:
https://www.stereolabs.com/docs/ros/zed-node/#zed-parameters