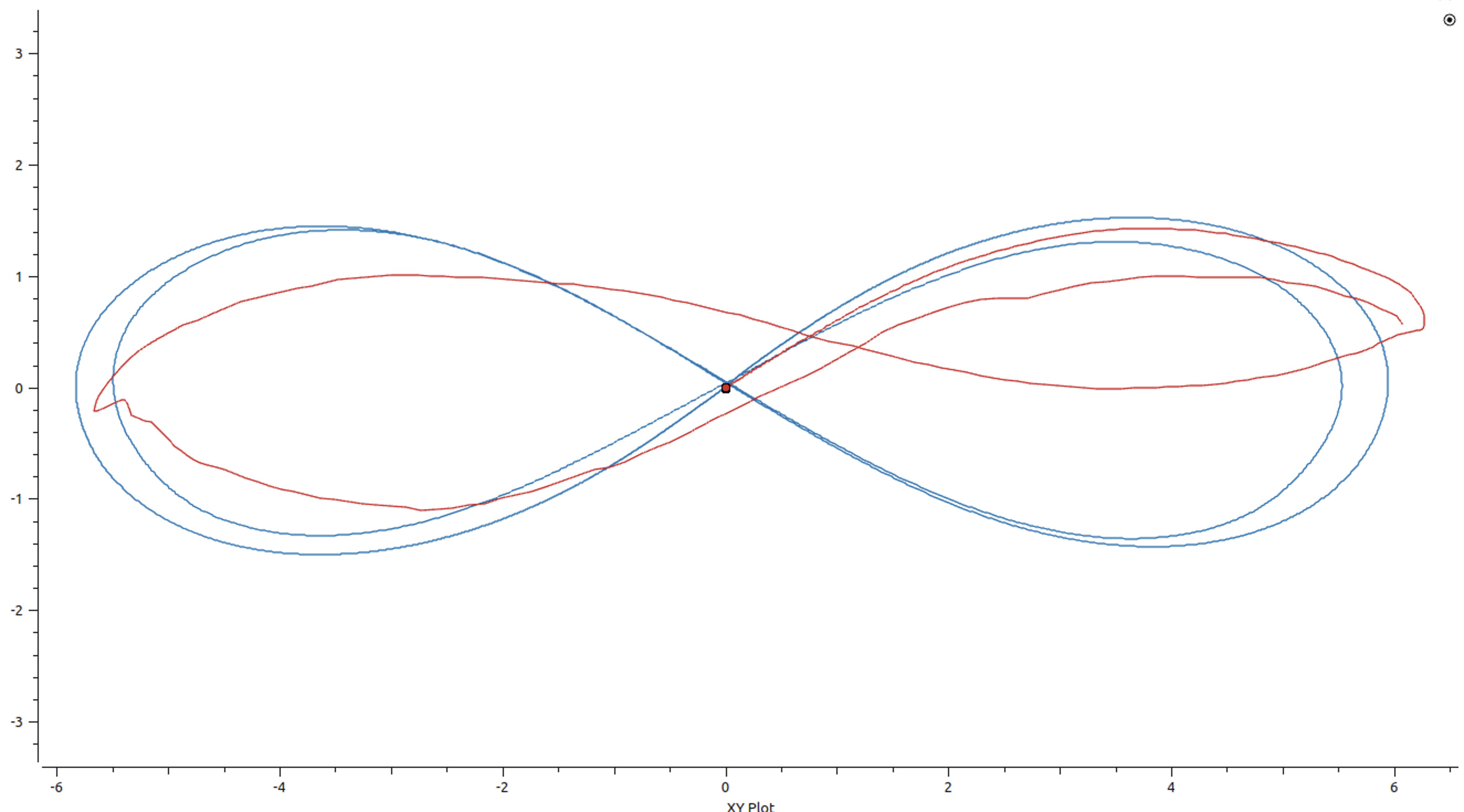
We are testing the Positional Tracking Module of the ZED X Mini, but we are getting really poor performances (see the attached image, showing the comparison between the ground truth of a Motion Capture System - blue - and the results from the zed camera - red -, axes are in meters. Error on the Y axe is up to 1.2 meters, 40% of the trajectory width as it is 3 meters).
The problem doesn’t seem to be the environment as an Intel T265 can nearly match the ground truth position (we want to move to the ZED X Mini as the Intel is out of production).
Do you have any suggestions? Is there any particular configuration or calibration that should be used for this scenario?
The parameters we are using are:
InitParameters init_parameters; init_parameters.camera_resolution = RESOLUTION::SVGA; init_parameters.coordinate_system = COORDINATE_SYSTEM::RIGHT_HANDED_Z_UP_X_FWD; init_parameters.coordinate_units = UNIT::METER; init_parameters.camera_image_flip = FLIP_MODE::OFF; init_parameters.sensors_required = true; init_parameters.camera_fps = 120; PositionalTrackingParameters tracking_parameters; positional_tracking_param.enable_area_memory = true;