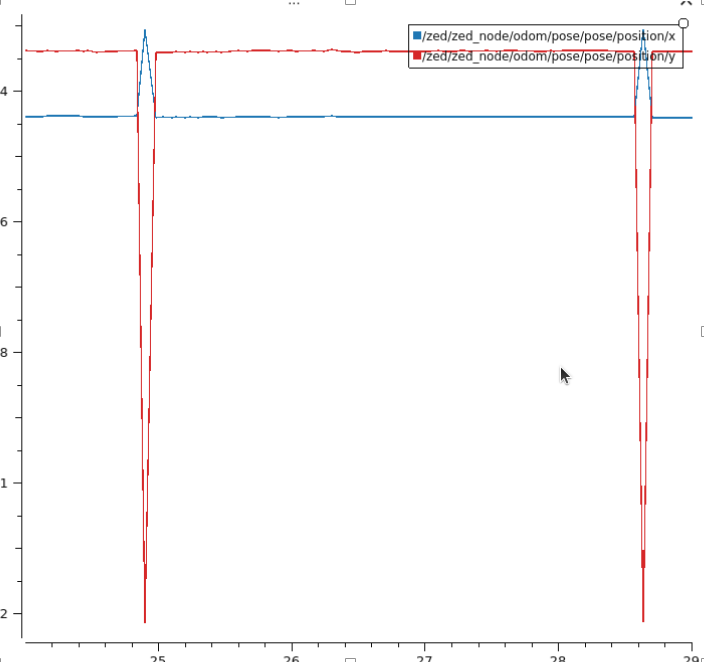
My odometry is very noisy, I see sharp pulses that teleport the odom->baselink transform. I want to pass it through a custom filter that can handle these pulses, I’m wondering if something like this is possible?
You can use the robot_localization package to filter odometry information.