Hi.
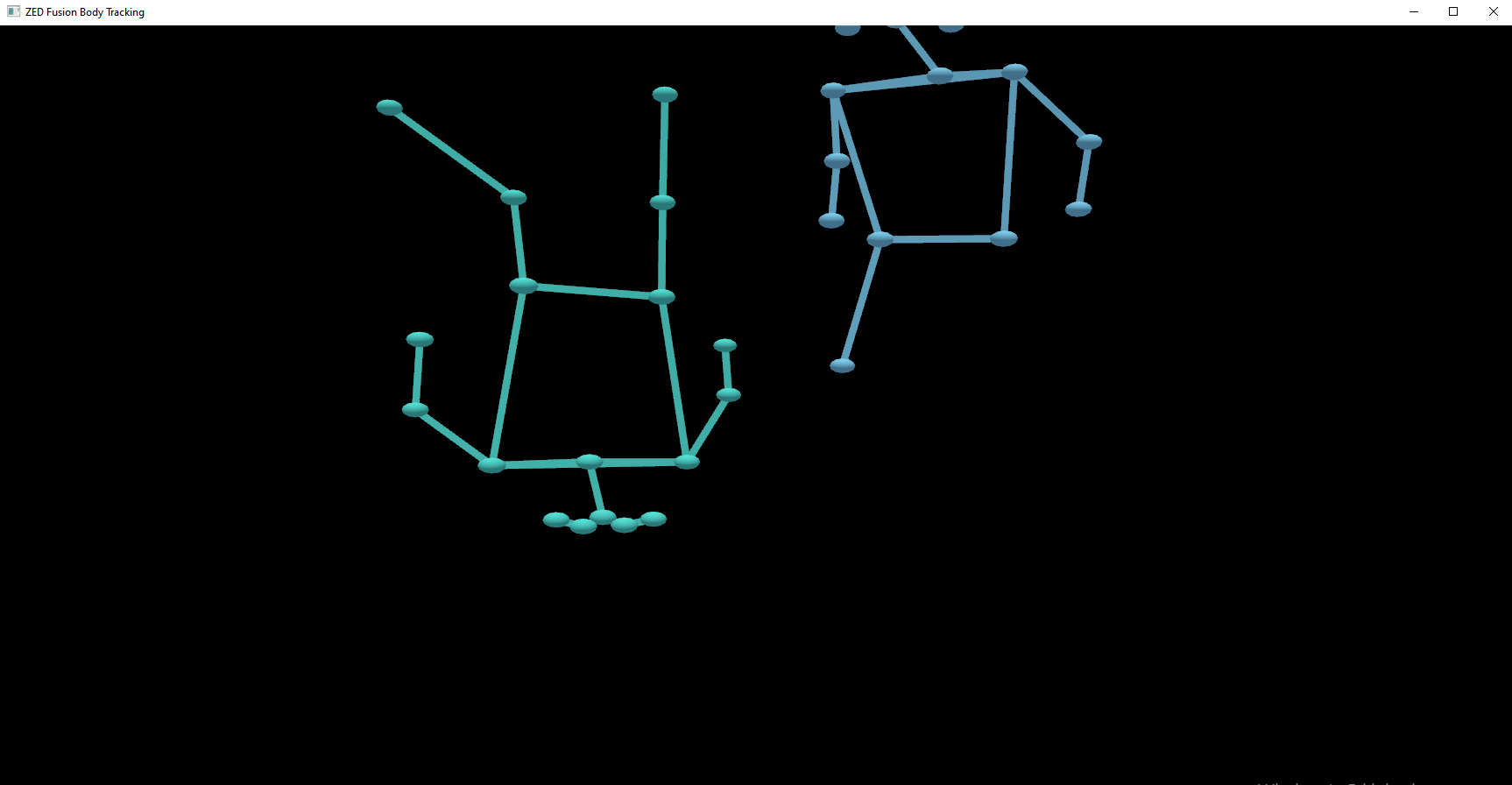
I’m trying to run Fusion.py with 2 svos. When I open a stream with the cameras from which these files were shot, fusion does not work 100% correctly, but at least it can detect the fixed person. However, when I record this stream and try to run the fusion file with svo, I get a very problematic output.
Can you share the ZED360 calibration file you’re using?
To read SVO files with Fusion, you have to first calibrate the cameras together with ZED360, then modify the calibration file like described here: Fusion Sample Code with SVO Files - #2 by JPlou
Hello, I calibrated the cameras and changed the json file exactly by looking at this link, but the output is in the screenshot I posted. I am sharing the json file below.
These 2 cameras are on the same table and there is about 1 meter difference between them. Could the calibration be faulty? If it is faulty, how does the fusion I open via stream work properly?