I am trying to display the depth image, similar to the Depth Viewer and be able to print the distance to the terminal at any point with mouse click.
When I attempt following the OpenCV tutorial page, I get the following error (I think it is outdated): AttributeError: 'pyzed.sl.CameraInformation' object has no attribute 'camera_resolution'
I have made better progress using the following code:
import cv2
import pyzed.sl as sl
# Create a ZED camera object
zed = sl.Camera()
# Set configuration parameters
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD720
init_params.coordinate_units = sl.UNIT.MILLIMETER
#init_params.depth_mode = sl.DEPTH_MODE.NEURAL
# Open the camera
err = zed.open(init_params)
if err != sl.ERROR_CODE.SUCCESS:
print("Failed to open ZED camera")
exit(1)
# Create and set RuntimeParameters after opening the camera
runtime_parameters = sl.RuntimeParameters()
# Create an OpenCV window
cv2.namedWindow("Depth Map")
# Mouse click event handler
def onMouseClick(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
depth_map = param
depth_value = depth_map.get_value(x, y)
print("Depth value at mouse click: {} millimeters".format(depth_value))
# Main loop
while True:
# Capture a new frame
if zed.grab() == sl.ERROR_CODE.SUCCESS:
# Retrieve depth map
depth_map = sl.Mat()
zed.retrieve_measure(depth_map, sl.MEASURE.DEPTH)
# Display depth map
depth_image = depth_map.get_data()
cv2.imshow("Depth Map", depth_image)
# Handle mouse click event
cv2.setMouseCallback("Depth Map", onMouseClick, depth_map)
# Wait for key press
if cv2.waitKey(10) == 27:
break
# Close the camera
zed.close()
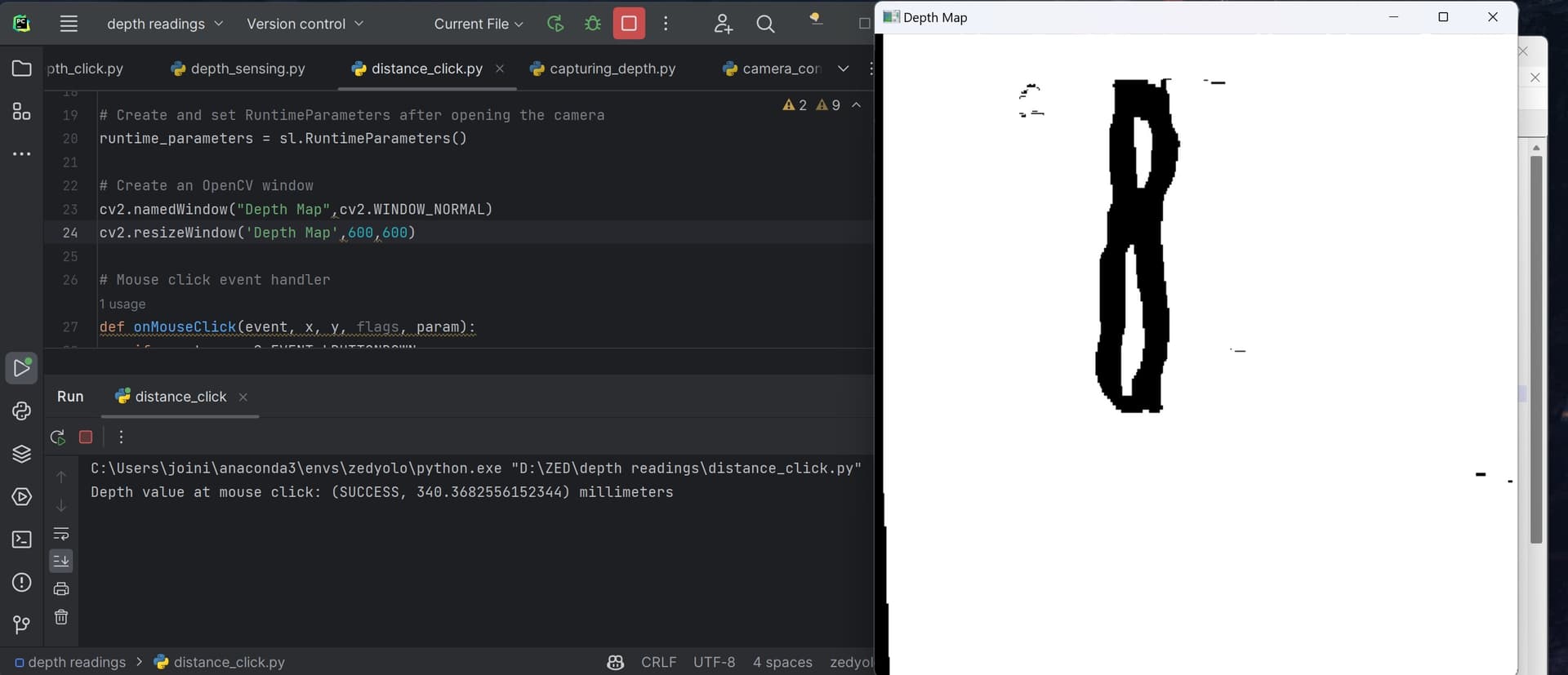
The code launches a depth map that is difficult to see but the mouse click event returns a working distance. When I set the initalisation parameter of the resolution to HD2K the display is even more white. How can I display a better depth map and also show the same colour depth map displayed by the Depth Viewer?