I’m using the ZedX on jetpack 6.1 in docker. I get this error when opening the camera for the first time
[2025-06-09 13:33:36 UTC][ZED][WARNING] IBuilder::buildSerializedNetwork: Error Code 4: Internal Error (Could not find any implementation for node /decoder.3/stem/rbr_reparam/Conv + /decoder.3/stem/nonlinearity/Relu due to insufficient workspace. See verbose log for requested sizes.)
> python zedx_fps.py -n 2 -d
Testing 1 camera(s) with NEURAL_PLUS depth mode for 5 seconds...
[2025-06-09 13:26:58 UTC][ZED][INFO] Logging level INFO
^C[2025-06-09 13:26:58 UTC][ZED][INFO] [Init] Depth mode: NEURAL PLUS
^[[A^C[2025-06-09 13:27:00 UTC][ZED][INFO] [Init] Camera FW version: 2001
[2025-06-09 13:27:00 UTC][ZED][INFO] [Init] Video mode: HD1200@60
[2025-06-09 13:27:00 UTC][ZED][INFO] [Init] Serial Number: S/N 40847842
Optimized model not found, trying to download it...
[2025-06-09 13:27:01 UTC][ZED][INFO] AI model not found, downloading
/usr/local/zed/resources/neural_depth_5.2.model 100%[=====================================================================================================================>] 26.36M 11.1MB/s in 2.4s
[2025-06-09 13:27:04 UTC][ZED][INFO] Please wait while the AI model is being optimized for your graphics card
This operation will be run only once and may take a few minutes
Optimizing neural_depth_5.2 / 0.5% [> ] ETA: 5min 48s Trying to download model timing cache to speed up optimization process...
Optimizing neural_depth_5.2 \ 83.1% [================> ] ETA: 0min 59s [2025-06-09 13:33:36 UTC][ZED][WARNING] IBuilder::buildSerializedNetwork: Error Code 4: Internal Error (Could not find any implementation for node /decoder.3/stem/rbr_reparam/Conv + /decoder.3/stem/nonlinearity/Relu due to insufficient workspace. See verbose log for requested sizes.)
[2025-06-09 13:33:37 UTC][ZED][ERROR] Model optimization failed
Traceback (most recent call last):
File "zedx_fps.py", line 204, in <module>
[2025-06-09 13:33:37 UTC][ZED][ERROR] [Object Detection] Object detection model is corrupted or unreadable
[2025-06-09 13:33:37 UTC][ZED][ERROR] [ZED] [Depth] NEURAL CORRUPTED MODEL
[2025-06-09 13:33:37 UTC][ZED][WARNING] CORRUPTED SDK INSTALLATION in sl::ERROR_CODE sl::Camera::open(sl::InitParameters)
main()
File "zedx_fps.py", line 200, in main
run_fps_test(args.num_cameras, duration)
File "zedx_fps.py", line 147, in run_fps_test
status = zed.open(init_params)
^^^^^^^^^^^^^^^^^^^^^
KeyboardInterrupt
[2025-06-09 13:33:37 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
[2025-06-09 13:33:37 UTC][ZED][ERROR] [ZED] sl::Camera::Open has not been called, no Camera instance running.
I have tried deleting all the files from /usr/local/zed/resources and optimizing multiple times. Zed diagnostic doesn’t indicate any obvious issues
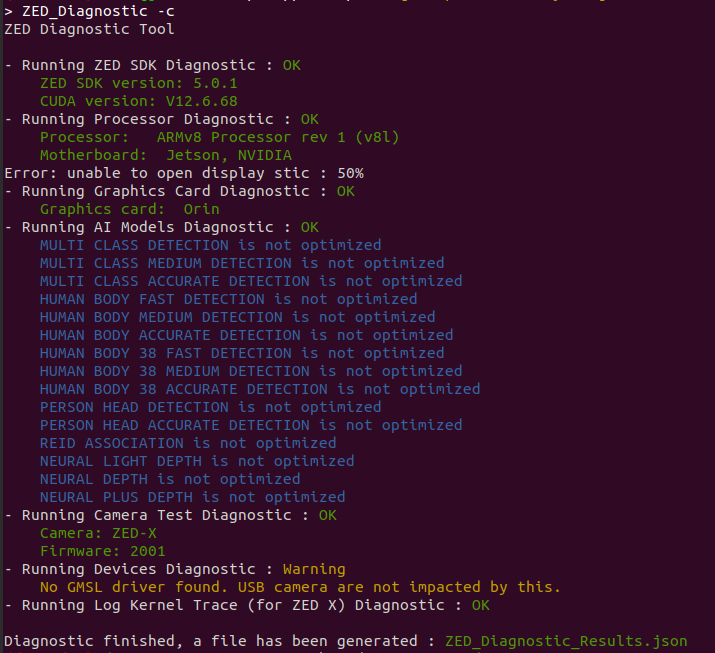
ZED_Diagnostic_Results.json (16.2 KB)