Hello! I’ve been having some problems recently with my ZED 2i camera. The focal length of my camera is 2.1mm. The version of ZED SDK I’m using is v4.0.4.
I want to use the ZED 2i camera to identify the distance of a speed bump on the road from ego-vehicle and the height of the speed bump. So I installed the ZED 2i camera on the roof of the car at a height of about 1.4m. Then I captured some videos using my ZED 2i camera and used the NEURAL Depth Mode to get the 3D point cloud. For better visualization, I imported the point cloud .ply file into Cloudcompare software.
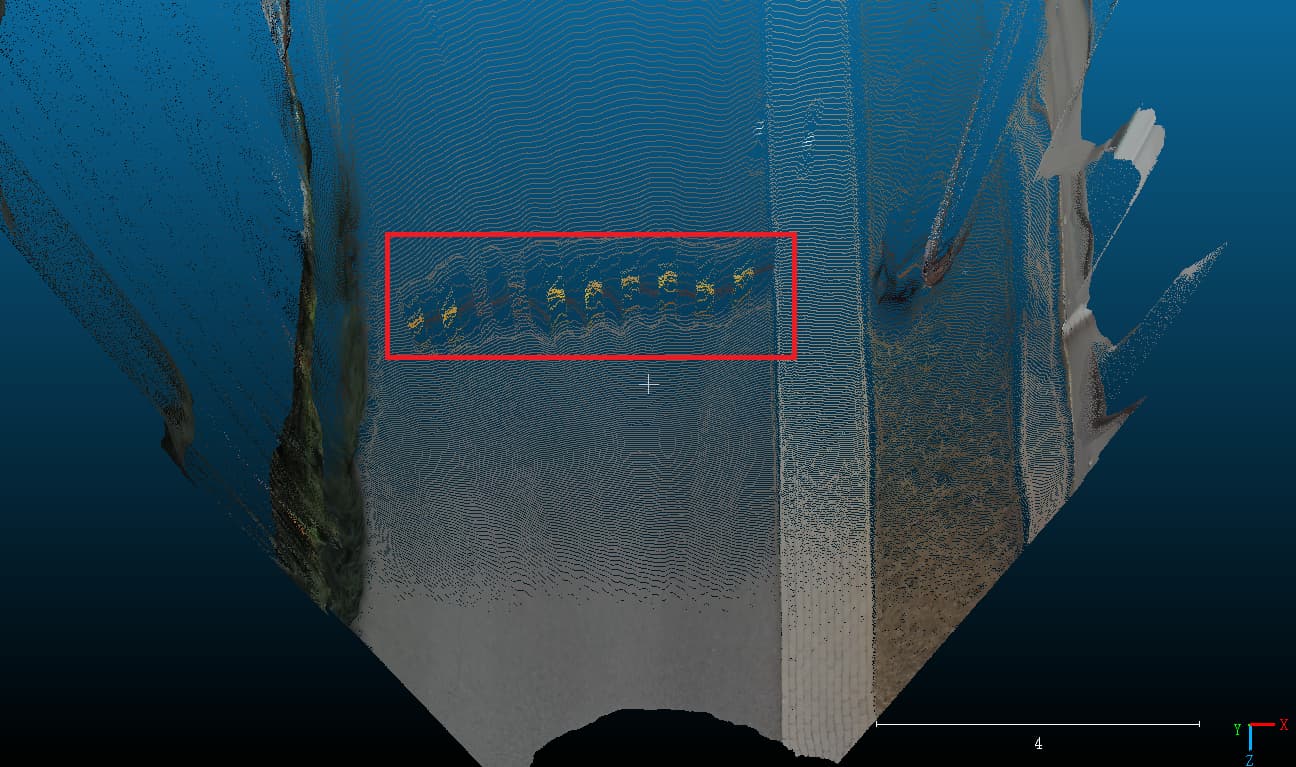
From the point cloud I see some problems. Take the following frame of image as an example. It observes 3D point clouds from a bird’s eye view.
In this time, the distance between the speed bump and ego-vehicle is about 8m. However, the quality of the 3D point cloud in the speed bump area, which is marked by a red box, is so poor that I can’t get a good estimate of the distance and height of the speed bump.
What I want to know is is this a problem with the accuracy of the stereo matching algorithm? Is there any way to improve this accuracy?
Looking forward to a reply. Thanks.
Thanks for you reply.
I’ve been using ULTRA Depth Mode before using NEURAL Depth Mode. I have compared the 3D point cloud produced by the two modes. The 3D point cloud obtained by NEURAL Depth Mode is more accurate and stable than that obtained by ULTRA Depth Mode.
In theory, the NEURAL Depth Mode is based on neural network, but the ULTRA Mode is supposed to use traditional stereo matching methods. The stereo matching of NEURAL Depth Mode should be better.
Hi @niuge12138
I recommend upgrading to the latest ZED SDK v4.0.8.
I also advise playing with the depth confidence parameter to tune the point cloud and remove outliers.
What is the height of the speed bump?
Hi! The height of the speed bump is 43mm.
As you said, I have upgraded the SDK version to v4.0.8. But it doesn’t look like the quality of the point cloud has improved much.
@niuge12138 what is the distance of the bumpers from the camera?
Please note that the precision of the depth estimation is ~1% in close range (<3m) in optimal conditions, so if the bumpers are farther than 3 m it is possible that they are not correctly detected.
@Myzhar In the example I gave above, the distance of the bumper is about 8m. I want to estimate the height of the speed bump in a distance range of 3-8m. But as you said, the precision of the depth estimation is ~1% in close range (<3m) in optimal conditions. Maybe It is difficult to accurately estimate speed bump height at such distances.
Yes, it’s a tech limitation for the moment.
I can’t exclude that in a near future we will be able to improve the precision of the point cloud to sub-1% thanks to NEURAL processing.