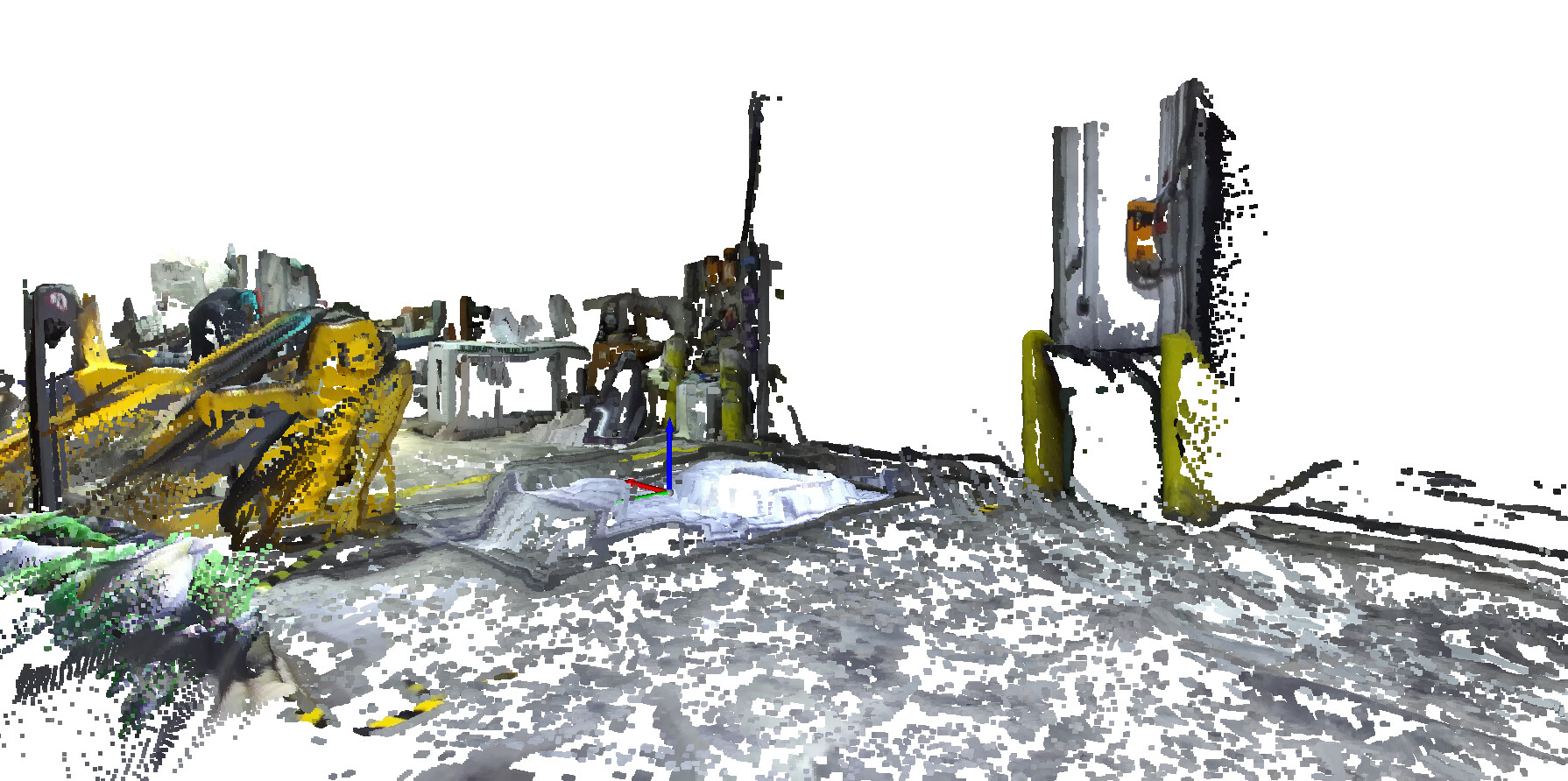
I’m testing a multi-camera application for a client and I have noticed that pointcloud quality in the Fusion module is significantly better, especially on ground surfaces than individual camera pointcloud retrieval. For reference:
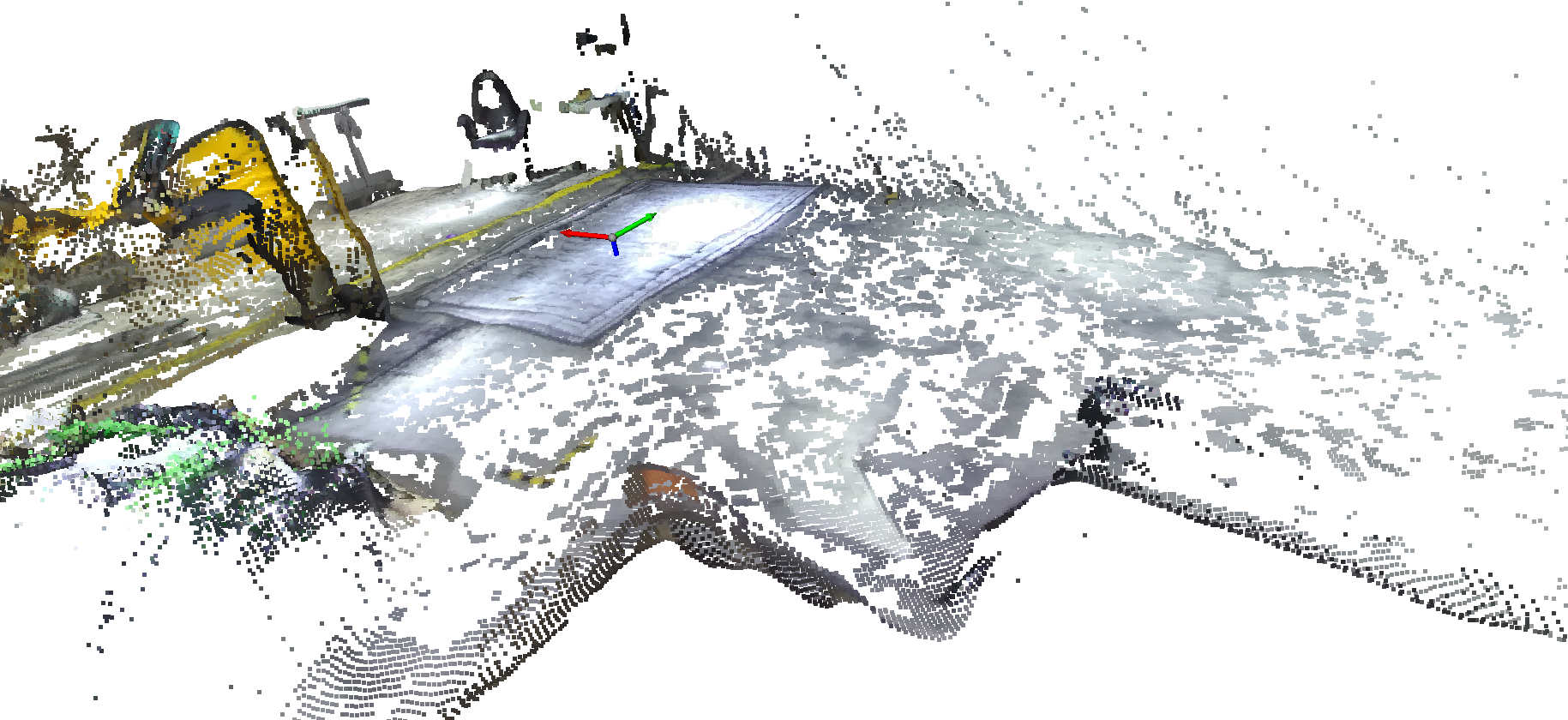
Merging individual pointclouds with sl.Camera.retrieve_measure():
The only reason I am making this rather obvious issue is to understand whether I can somehow apply the processing improvements of the Fusion module to per-camera retrieval because I’m having issues with the Fusion API in python and more specifically synchronization, even though I am connected with a local USB3.0 connection. It seems that synchronization parameters are read-only in python, but this is an issue for another topic.