I’m trying to get the mask of humans, but it is inconsistent.
import cv2
import sys
import time
import pyzed.sl as sl
import numpy as np
import argparse
import math
import numpy as np
from matplotlib import pyplot as plt
from skimage.measure import label, regionprops, regionprops_table
import pygame
from pygame.locals import *
from OpenGL.GL import *
from OpenGL.GLU import *
def main():
print("Running Body Tracking sample ... Press 'q' to quit, or 'm' to pause or restart")
# Create a Camera object
zed = sl.Camera()
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters()
#init_params.camera_fps = 30 # Set fps at 30
init_params.camera_resolution = sl.RESOLUTION.HD1080 # Use HD1080 video mode
init_params.coordinate_units = sl.UNIT.CENTIMETER # Set coordinate units
init_params.depth_mode = sl.DEPTH_MODE.QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
# Open the camera
err = zed.open(init_params)
if err != sl.ERROR_CODE.SUCCESS:
exit(1)
# Enable Positional tracking (mandatory for object detection)
positional_tracking_parameters = sl.PositionalTrackingParameters()
# If the camera is static, uncomment the following line to have better performances
# positional_tracking_parameters.set_as_static = True
zed.enable_positional_tracking(positional_tracking_parameters)
body_param = sl.BodyTrackingParameters()
body_param.enable_segmentation = True
body_param.enable_tracking = True # Track people across images flow
body_param.enable_body_fitting = False # Smooth skeleton move
body_param.detection_model = sl.BODY_TRACKING_MODEL.HUMAN_BODY_FAST
body_param.body_format = sl.BODY_FORMAT.BODY_18 # Choose the BODY_FORMAT you wish to use
# Enable Object Detection module
zed.enable_body_tracking(body_param)
body_runtime_param = sl.BodyTrackingRuntimeParameters()
body_runtime_param.detection_confidence_threshold = 40
# Get ZED camera information
camera_info = zed.get_camera_information()
# 2D viewer utilities
bodies = sl.Bodies()
image = sl.Mat()
depth = sl.Mat()
display_resolution = sl.Resolution(min(camera_info.camera_configuration.resolution.width, 1280), min(camera_info.camera_configuration.resolution.height, 720))
key_wait = 10
while True:
# Grab an image
time_temp=time.time()
if zed.grab() == sl.ERROR_CODE.SUCCESS:
print("TIME",time.time()-time_temp)
# Retrieve left image
zed.retrieve_image(image, sl.VIEW.LEFT, sl.MEM.CPU)
# Retrieve bodies
zed.retrieve_measure(depth, sl.MEASURE.DEPTH)
zed.retrieve_bodies(bodies, body_runtime_param)
bodies_list=bodies.body_list
image_left_ocv = image.get_data()
key = cv2.waitKey(key_wait)
cv2.imshow("ZED | 2D View", image_left_ocv)
cv2.waitKey(1)
print("FPS : ",zed.get_current_fps())
if key == 113: # for 'm' key
for body in bodies_list:
print("body ID ",body.id, " Position ",body.keypoint_2d[2])
mask=body.mask
temp=mask.get_data()
if body.mask.is_init():
print(temp)
plt.imshow(temp)
plt.show()
print(temp.shape)
break
image.free(sl.MEM.CPU)
zed.disable_body_tracking()
zed.disable_positional_tracking()
zed.close()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
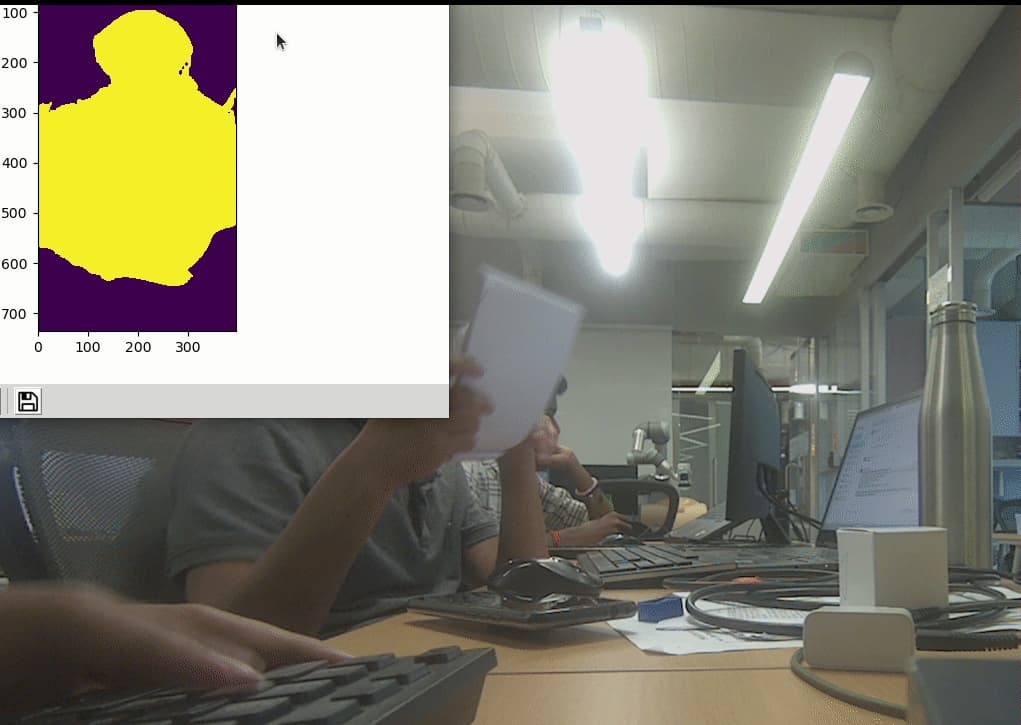
Sometime the mask is completely captured.
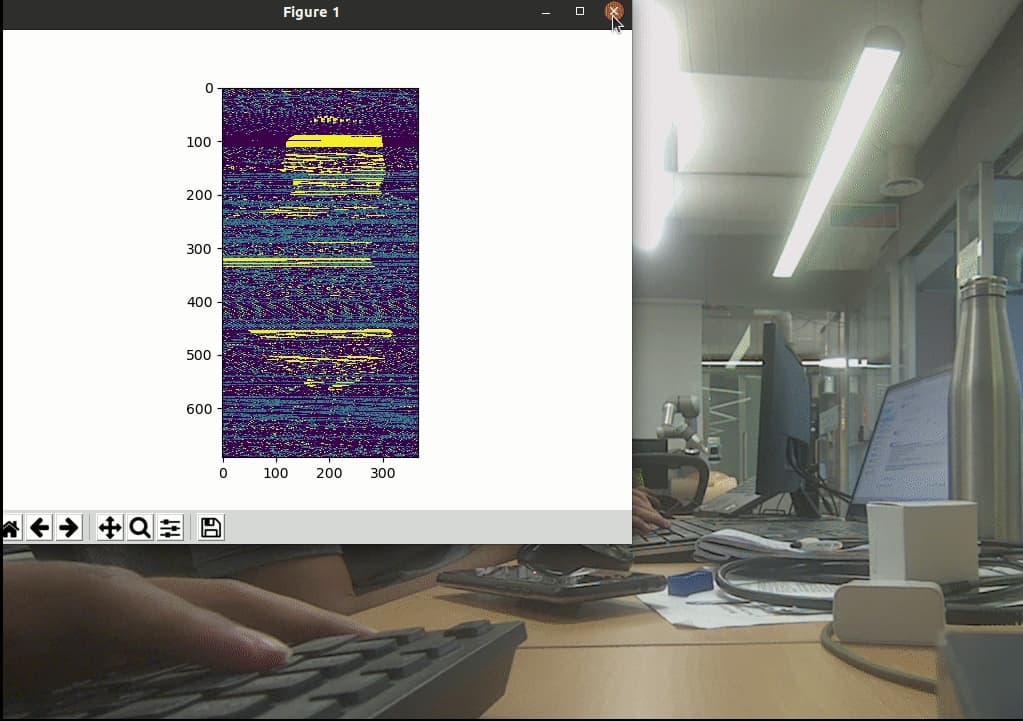
But mostly, the mask is not fully captured.