Hi,
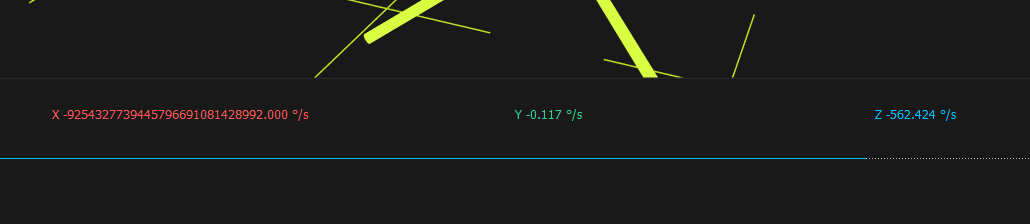
When I used the ZED Sensor Viewer in Gyroscope mode, I got the following data. Why is there such “junk” data in the x-axis?
Hi,
When I used the ZED Sensor Viewer in Gyroscope mode, I got the following data. Why is there such “junk” data in the x-axis?
Hi @vancao2609
Welcome to the StereoLabs community.
I noticed that the data on the Z-axis is also not coherent.
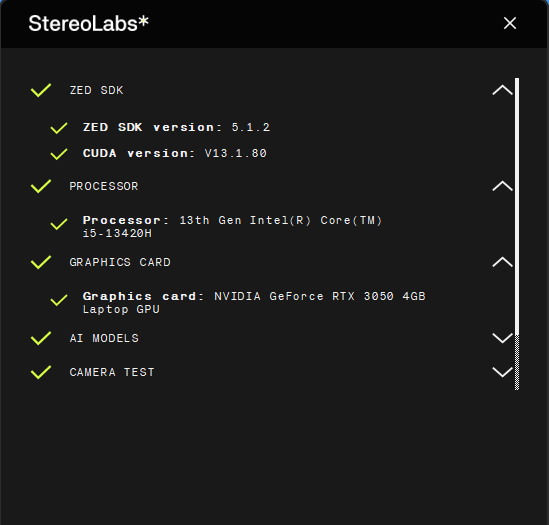
Please run ZED Diagnostic and share the content of the JSON file that it generates.
This is a screenshot. You must click the “SAVE” button when the diagnostic process is completed and send me the file it generates.
Read more here:
Vào Thứ 6, 5 thg 6, 2026 vào lúc 17:15 Walter Lucetti (Stereolabs) support@stereolabs.com đã viết:
This is a ZED Mini camera. The calibration of the IMU is probably no longer valid.
Please put the camera on a planar surface (the floor is good) and run this command:
ZED_Calibration --cimu
if this does not fix the problem, please run this command:
ZED_Calibration --calib_dynamic
What are there command: ZED_Calibration --cimu and ZED_Calibration --calib_dynamic?
Vào Thứ 6, 5 thg 6, 2026 vào lúc 22:40 Walter Lucetti (Stereolabs) support@stereolabs.com đã viết:
Hi Nguyen,
What are there command:
ZED_Calibration --cimuandZED_Calibration --calib_dynamic?
They are text commands to be executed from the shell.
Please read more here: https://support.stereolabs.com/hc/en-us/articles/30529411012247-How-can-I-remove-the-IMU-drift-of-my-camera
Please let me know if you need any further information or details.
Best regards,
Walter
Walter Lucetti
Senior Computer Engineer
SDK / Robotics / HW
Stereolabs Support