Hello,
[1] Reason for Using the Old Platform:
I understand that it is rational to upgrade the board from the old TK1. However, I’ve invested a lot of time into this board to work again, and it’s almost finished. I just don’t want to give up now. If this doesn’t succeed, my 8-year-old Jetson TK1 board will end up in the trash bin, contributing to environmental pollution.
[2] Previous Steps:
I’m using ZED SDK version 1.1.1 because the Jetson TK1 only supports up to version 1.2, and the ZED homepage doesn’t have the 1.2 version available for download.
I received the calibration file for my camera’s serial number from ZED support via email, and I placed this configuration file into /usr/local/zed/settings. ZED Explorer runs successfully. Initially, “ZED Depth Viewer” output the following error message: “Use ZED Calibration tool to update your camera calibration! Your calibration seems outdated!” but it worked after I ran it with sudo.
[3] Error When Running Latest ZED SDK Samples:
I found a way to run example code on ZED homepage:
I want to follow the steps in the official guide, but ZED SDK 1.1.1 seems very different from the latest version.
The latest example code fails to run, giving the following error message:
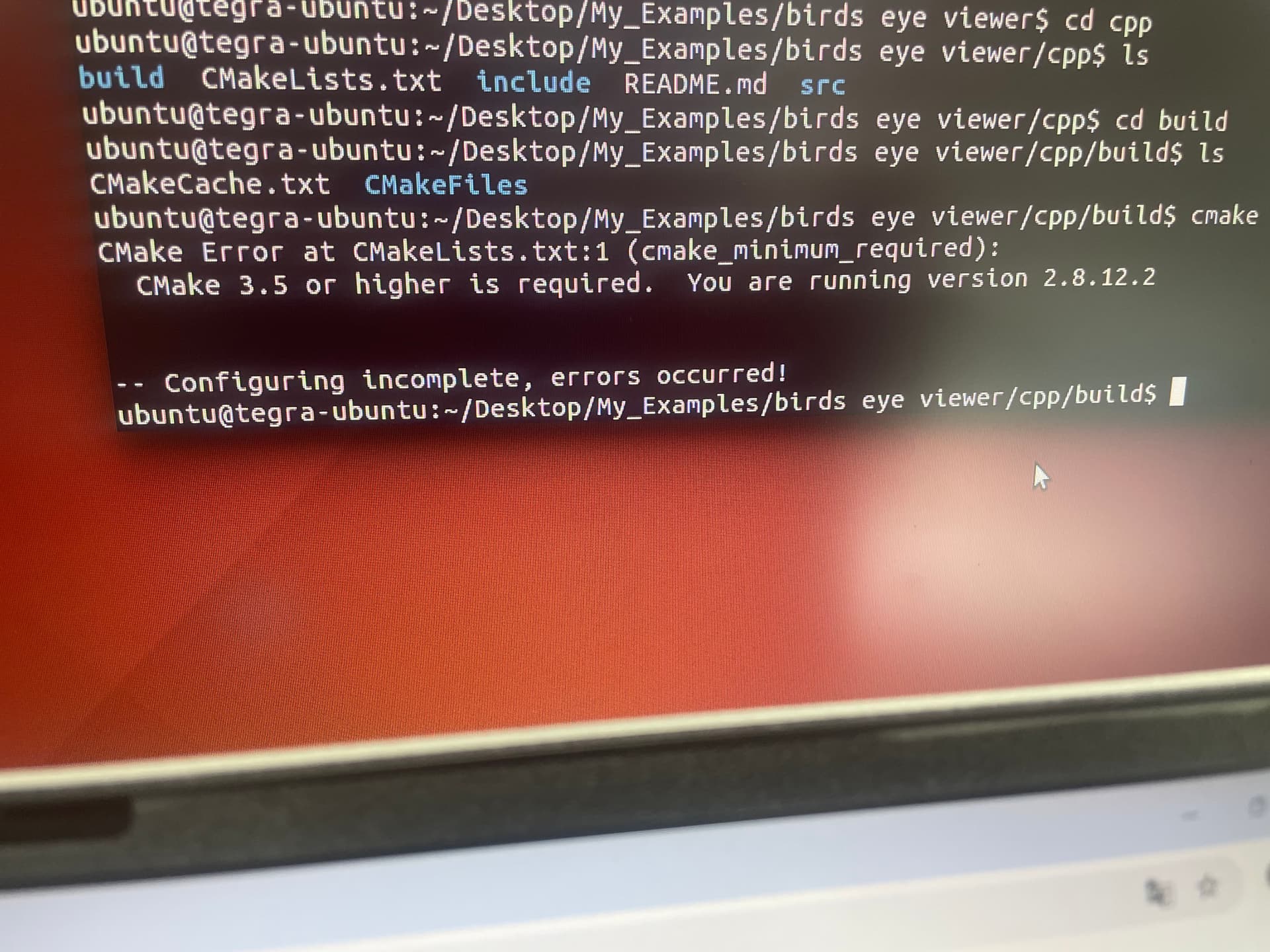
"CMake Error at CMakeLists.txt:1 (cmake_minimum_required):
CMake 3.5 or higher is required. You are running version 2.8.12.2
– Configuring incomplete, errors occurred!"
Question 1: The latest ZED examples include many useful features, like object detection. Is it impossible to run this example code on the Jetson TK1 (using ZED SDK 1.1.1)?
Question 2: I found the sample code for the TK1 under /usr/local/zed/sample/cpu and /usr/local/zed/sample/gpu:
[CPU Examples]:
Multi Input, Optimized Grab, Recorder, Save Depth, Simple Tracking, SVO Converter, SVO Playback, Tracking Viewer with OpenCV
[GPU Examples]:
Background Subtraction, Right Image Disparity
Because the CPU code is too slow and low in quality, I want to use the GPU, but there aren’t many sample codes available. I want to confirm if these are the only examples available with ZED SDK 1.1.1.

