Cubia
May 9, 2025, 9:51pm
1
Hi everyone,
I’m trying to run the official C++ “multi-camera fusion” sample on a Jetson Orin NX (16 GB) with four ZED X cameras connected via GMSL2. I calibrated all four cameras using ZED360 (following the official guide) and verified that in the ZED360 UI they are positioned at the same height (forming the corners of a rectangle) and all pointing toward the intersection of the diagonals.
When I launch the sample (with my own JSON config from ZED360), I see:
Only camera 0 (the reference camera in my JSON) rendered correctly.Cameras 1–3 appear tilted/shifted incorrectly in the GLViewer.The fused point cloud is not fused at all; instead I get four overlapping clouds (one per camera).
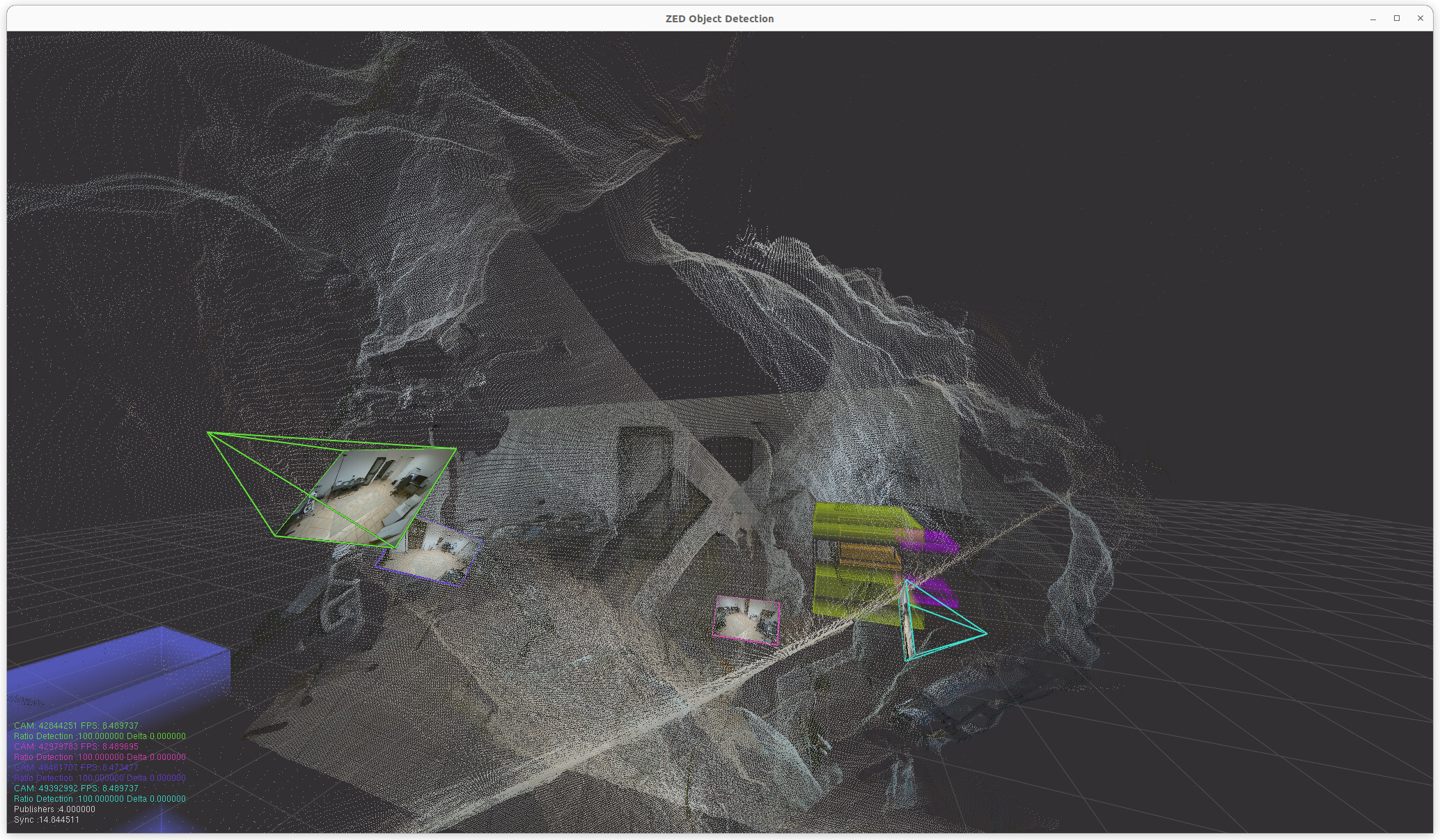
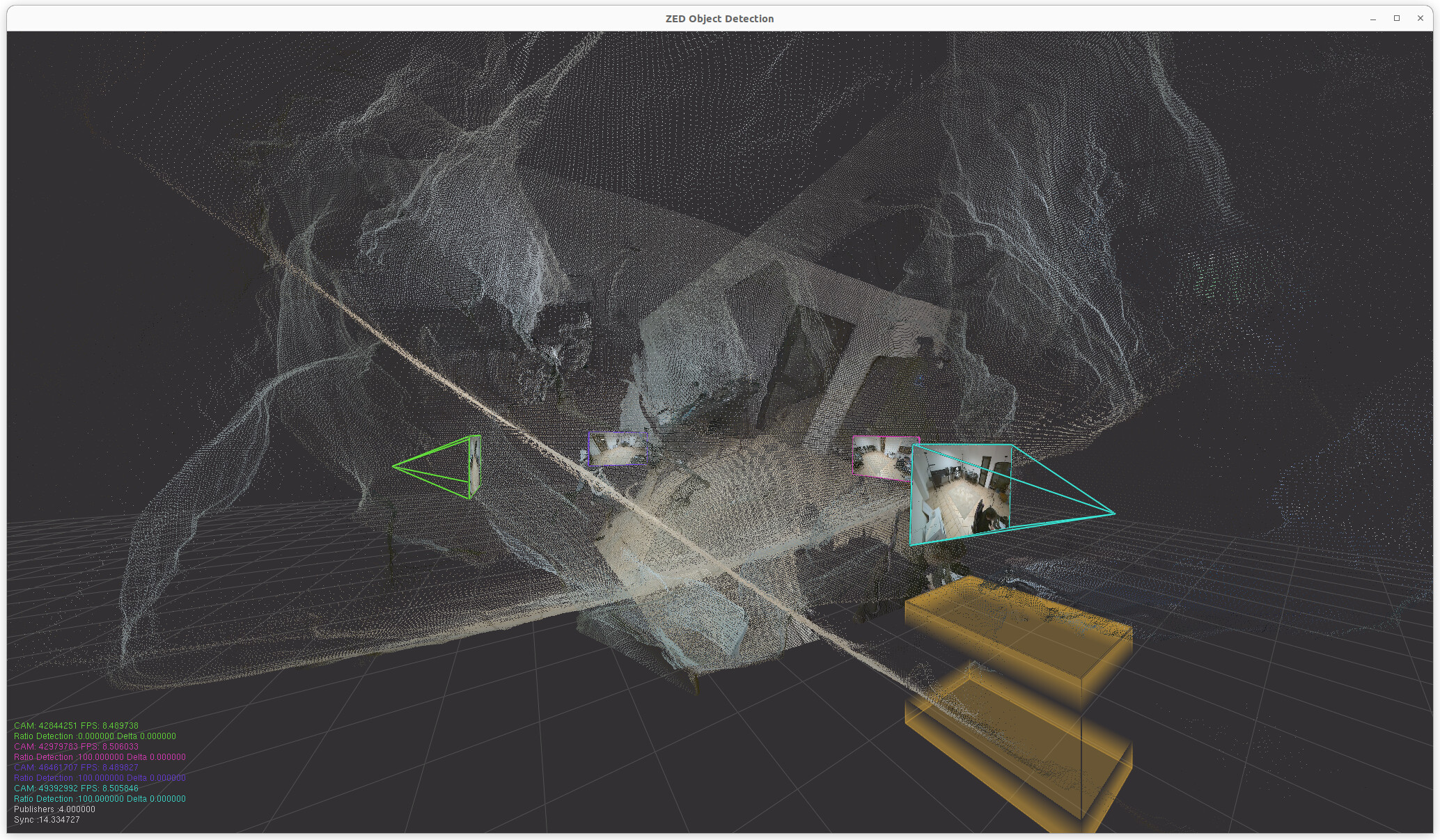
Here’s a screenshot showing the problem:
What I’ve tried:
Verified JSON poses are correct (identity + 3 relative transforms)
Removed any Fusion SLAM calls (enablePositionalTracking + getPosition) to force pure static extrinsics
Ensured I apply each pose exactly once when drawing raw clouds (in that way, cameras are correctly drawn)
Still, each camera cloud remains in its own plane and the fused cloud is never combined (as you can see in the following screenshot)
Environment:
Hardware: ZED Box Orin NX 16 GBCameras: 4× ZED X via GMSL2JetPack: 6.0ZED SDK: 5.0Sample code: latest multi_camera_fusion example from GitHub
My questions:
Am I missing a specific Fusion API call to retrieve the truly fused point cloud in world coordinates?
Is there an extra step needed to tell Fusion “use these static extrinsics only, no SLAM drift”?
Does anyone know why only camera 0 ends up correct and the others keep their local orientation?
Cubia
May 12, 2025, 12:35pm
2
Does anyone knows how to solve?
Do you know if some of the cameras are flipped?
If so, can you, in the ClientPublisher.cpp code, set the sl::InitParameters::camera_image_flip to sl::FLIP_MODE::ON or sl::FLIP_MODE::AUTO ?
Stereolabs Support
Cubia
May 14, 2025, 12:49pm
4
Unfortunately, nothing changes. It seems like all the point clouds are displayed in their own coordinate system and not fused at all.
I think you are running the sample that shows how to open multiple cameras at the same time, not the sample that demonstrates how to display the fused pc.
You need to run this one: https://github.com/stereolabs/zed-sdk/tree/master/depth%20sensing/fusion/cpp
Stereolabs Support
Cubia
May 14, 2025, 1:31pm
6
Ok, i’ll try just to make sure everything is correct!zed-sdk/object detection/multi-camera/cpp at master · stereolabs/zed-sdk · GitHub i’m currently working with this code, is not written to perform object detection in 3D?
Cubia
May 14, 2025, 1:57pm
7
i got the same problem also with the viewer in this code!
{
There is some issue related to the configuration? As i said before, the only correct cam is the reference one (id 42844251).
Cubia
May 14, 2025, 10:13pm
8
I’ve tried almost everything, the fusion seems broken. If i subscribe only one cam the point cloud is displayed correctly, and each camera added destroys the point cloud. The config file is generated from ZED360, the cam are at the vertices of a rectangle looking at the centre…
Cubia
May 15, 2025, 9:39am
9
I noticed that if the cam are not looking at the plane, it works correctly. Is there a way to support cameras oriented in that way?
Can you try to replace this line : https://github.com/stereolabs/zed-sdk/blob/master/depth%20sensing/fusion/cpp/src/main.cpp#L155 if(fusion.getPosition(pose, sl::REFERENCE_FRAME::WORLD, id, sl::POSITION_TYPE::RAW) == sl::POSITIONAL_TRACKING_STATE::OK) ?
Stereolabs Support