I found that orientation angle goes bad when time goes by.
I’m wondering is there any imu calibration(gyroscope, magnetometer etc…) tool for zed 2i
Hi @Jaewon
Welcome to the Sterelabs community.
What ZED SDK version are you using?
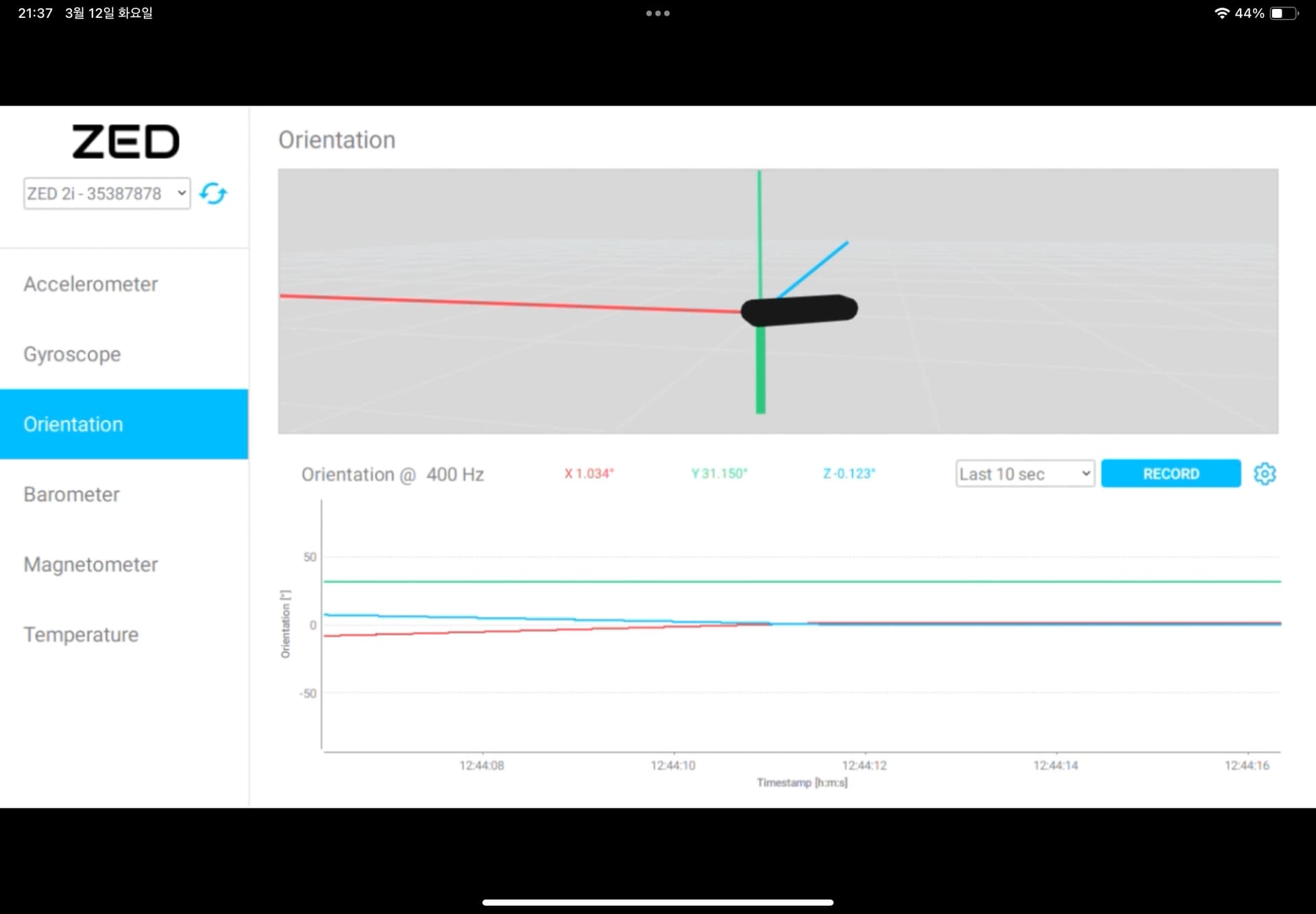
Please run the ZED Sensor Viewer tool and check if angular velocities (Gyroscope) and orientation have some kind of drift.
Please send me a screenshot of both the plots (gyroscope and orientation) after 30 seconds of running with the camera placed steady on the floor.
When i check sensor viewer there is no drift. I think it send me a good orientation data
I’m using ZED2i for a wearable robot and after wearing it and crossing obstacles for a few seconds on the flat, I got a inaccurate point cloud (like uphill not plain) when i convert it to world frame.
I don’t know whether depth map or IMU is problem so i’m going to check IMU first.
I use SDK version 4.0.8
I can confirm that the IMU is working correctly and there are no drifts.
Could you please send pictures that demonstrate the issue with the point cloud you mentioned, so that we can understand it better?