Hello, I am reaching out to request your assistance regarding an issue we are experiencing with the ZED X camera, which we are currently using in a mid-range detection project.
We have observed that certain objects, although clearly visible in the 2D image, appear poorly reconstructed in the 3D point cloud — particularly in terms of shape and depth consistency.
Additionally, the distance measurements returned by the camera seem to be significantly less accurate than expected, especially beyond a few meters. For example, according to the camera documentation, we should have an error of nearly 2% at 12 meters, but we are experiencing an error of nearly 10% at 6 meters.
Despite checking various parameters (depth settings, calibration, etc.), we have not yet identified the source of the issue.
Would you have any recommendations or guidance that could help improve the 3D reconstruction quality and distance reliability in such situations?
I am working on detecting a ball on a field with reduced dimensions. The field is 6 meters by 4 meters, and the ball has a diameter of approximately 15 cm. First, I perform ball detection, and then I obtain the distance to the ball from the depth map using zed.retrieve_measure(depth_zed, sl.MEASURE.DEPTH) followed by the function depth_zed.get_value(x, y)[1] on the pixel at the center of the ball. However, this is where the problem arises: the measured distances are not accurate enough (nearly 10% error at 6 meters), and the error becomes even more significant as the ball moves away from the center of the image.
In terms of parameters, I am currently using resolution=sl.RESOLUTION.HD1200 and depth_mode=sl.DEPTH_MODE.NEURAL.
We do not recommend taking a single-pixel depth measure. This is surely affected by noise. You can obtain better results by performing median filtering around the central pixel.
Furthermore, please consider that you are not calculating an Euclidean distance, but you are retrieving the perpendicular distance of the ball from the camera sensor plane. To obtain a distance, you must calculate it from the point cloud:
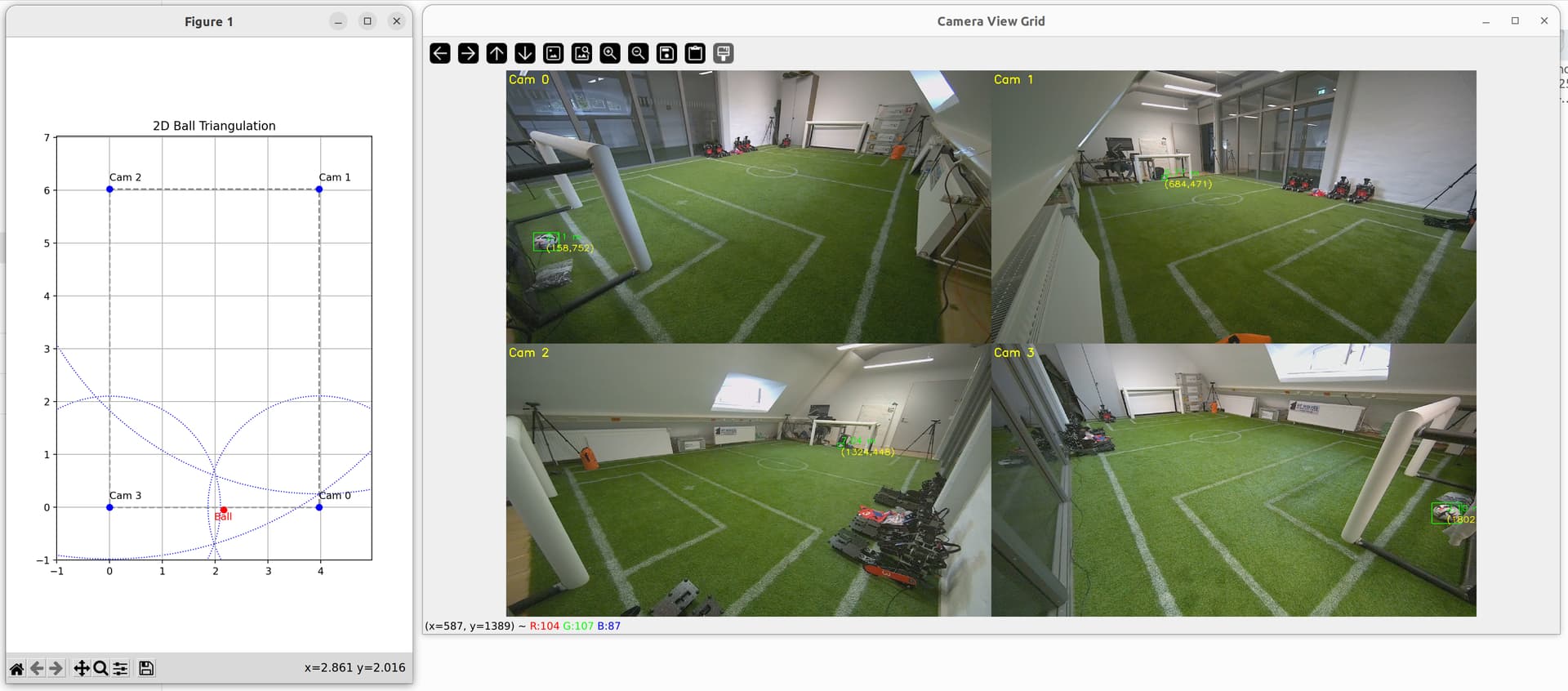
Hello, first of all, thank you for the advice. Now, I am taking into account the central point and its neighbors to avoid measurement noise, and I am using the function you recommended to measure the distance. However, despite some improvements, the results remain unsatisfactory. Here is an example of my display, which aims to determine the position of the ball based on the distance to the four cameras in the corners. Ideally, the four circles should intersect at a single point, but we are still far from that. We even performed a factory reset on each camera, but it didn’t change much. So, I am reaching out to you again in hopes of a solution.